
Интеллектуальная система мониторинга башенных кранов на строительных площадках
В статье показано, как сделать первые шаги, и представлено исследование, направленное на оценку возможностей беспроводных сенсорных сетей (БСС) для мониторинга работы башенных кранов на строительных площадках. После внедрения надежной системы дальнего действия БСС информация начинает собираться с различных специализированных датчиков (температура, ветер, расстояние), которые установлены на специальных узлах и передают информацию между собой и на центральный узел, который постоянно следит за нагрузкой сети, управляет ею и передает поступающую информацию на управляющее приложение. Это приложение, в свою очередь, показывает полученную информацию в виде понятной пользователю визуальной схемы, включает сигнализацию, когда набор запрограммированных правил противоречит условиям безопасности. Компоненты предложенной системы были протестированы в процессе экспериментов над пилотным образцом, и предварительные результаты показали потенциал систем БСС в улучшенном мониторинге башенных кранов и уменьшении аварий на строительных площадках.
Введение
Очевидно, что мониторинг и контроль вращающихся и очень подвижных объектов на строительных площадках, таких как башенные краны, чрезвычайно важен [13]. Исследование, проведенное Нейтзелем [10], показало, что более 1000 травм на стройплощадках произошло из-за кранов и подъемного оборудования в течение одного года в 23 штатах США. К примеру, невозможность слежения за определенными участками строительной площадки, на которой находятся башенные краны, и устранения небезопасных условий может привести к повышению риска аварии или травм для строителей [6, 12]. Травмы происходят не только у строителей, работающих на кранах, но и у наземных работников, даже у тех, кто думает, что находится на безопасном расстоянии от башенного крана. Похожие причины аварий изучались различными исследователями и ведомствами на протяжении нескольких лет. Управление по охране труда США заявило, что большинство аварий с башенными кранами происходит из-за падения стрелы крана [7]. Частота и серьезность таких аварий напрямую влияет на успех строительного проекта, вызывая задержки в работе и простой оборудования, что может негативно повлиять на прибыльность проекта [6].
Для уменьшения количества аварий с башенными кранами на строительной площадке и улучшения условий работы необходимо рассмотреть пути использования интеллектуальных беспроводных мобильных устройств для башенных кранов. Беспроводные технологии делают настройку и доработку автоматизированной окружающей среды легче, дешевле и более гибкой. Это добавляет новые области применения, где беспроводная передача является единственно возможным вариантом [1]. Часть проекта направлена на улучшение работы и производительности башенного крана с использованием технических средств, таких как:
- теги радиочастотной идентификации (RFID) [9] или ZigBee [15] для предоставления необходимой информации о поднимаемом грузе (тип, вес, необходимая рабочая процедура);
- видеокамеры на солнечных батареях для передачи изображения в реальном времени в кабину оператора крана для уменьшения разногласий между оператором и такелажниками, а также для предотвращения аварий [5, 6].
В результате последних разработок в технологиях беспроводной передачи данных использование БСС становится все более и более распространенным в различных мониторинговых и управляющих приложениях [3]. Низкая стоимость и высокая энергоэффективность БСС были подтверждены в процессе ее использования в закрытых помещениях [8, 11, 14], обуславливая ее использование в работе башенных кранов [16].
Будучи установленным на важном участке башенного крана, каждое устройство является частью ячеистой сети, работая как датчик или узел и релейное устройство для обмена данными в сжатой форме, при помощи согласованной радиопередачи [2]. Каждый узел соединяется в сеть для пересылки данных, собранных своим собственным датчиком или ближайшими соседними. Ячейка, в свою очередь, связывается с беспроводной локальной вычислительной сетью (WLAN), которая отсылает данные на главный узел для мониторинга и анализа. Эта ячеистая сеть является самоорганизующейся и самовосстанавливающейся, то есть если один узел выходит из строя, система ищет альтернативный путь для передачи данных датчика. Чем больше устройств подключено, тем более живучей становится сеть. Таким образом, данная сеть может эффективно пересылать сигналы, приходящие со всех датчиков, расположенных в труднодоступных и важных местах, что позволяет прекрасно контролировать работу башенных кранов на строительных площадках.
Тем не менее, насколько известно авторам, ни одно из предыдущих исследований не было направлено на мониторинг работы башенных кранов на строительных площадках с использованием недорогих БСС наряду с визуализацией всего процесса в реальном времени. Так что просто необходимо разработать новую, эффективную и экономичную, интеллектуальную БСС для мониторинга работы башенных кранов на строительных площадках, уменьшив распространенность похожих аварий.
Технологии
Оборудование
Мониторинговая система состоит из имеющейся в продаже БСС под названием SmartMesh от компании Dust Networks [4] и набора датчиков расстояния, температуры и ветра. Сеть SmartMesh (рис. 1) состоит из сетевых узлов, называемых мотами, которые являются беспроводными передатчиками со сверхнизким потреблением энергии и передают данные между собой и управляющим устройством. Это устройство осуществляет мониторинг, управление сетью и передает данные программе управляющей системы.

Рис. 1. Компоненты беспроводной сенсорной сети SmartMesh
Стоит отметить, что упомянутая выше сеть не будет работать без датчиков, прикрепленных к мотам. В этом случае моты передают данные между прикрепленными датчиками и используют расположенный на плате радиопередатчик, чтобы отправить пакеты данных к соседним мотам. В исследовательской работе фотоэлектрические, температурные и ветровые датчики были впервые рассмотрены как способ обнаружения нарушений и оповещения работников службы охраны труда. Например, фотоэлектрический датчик расстояния (рис. 2) в основном используется, чтобы обнаруживать ближайшие объекты, то есть близость крюка от поднимаемого груза либо близость стрелы башенного крана до ближайших объектов или частей других кранов на строительной площадке.

Рис. 2. Датчик расстояния
Их расстояние срабатывания составляет порядка 3 м, а рабочий диапазон — до 50 м. Точные температурные датчики (рис. 3) используются для установки необходимого температурного диапазона и оповещения в случае, если пороговая температура скоро будет достигнута либо превышена.

Рис. 3. Температурный датчик
Датчик скорости ветра, известный как анемометр (рис. 4), — это четырехлопастный воздушный винт, который при помощи вращения генерирует сигнал синусоидального напряжения, передаваемый на мот, для уведомления оператора крана об определенных погодных условиях.

Рис. 4. Анемометр
Весь комплекс оборудования — это надежный, экономически выгодный инструмент, предоставляющий возможности беспроводного мониторинга и контроля, сохраняющий время и деньги на установку, предоставляющий большую гибкость и дающий большее представление о работах на стройплощадке, чем проводная система. Более того, являясь беспроводной, эта система является также самовосстанавливающейся. То есть если один из мотов перестает работать, то мот, использовавший его в качестве пути (называемый «родительским»), автоматически выберет другой ближайший мот для передачи данных.
Программное обеспечение и алгоритм
Набор SmartMesh поставляется с приложением SmartMesh Console 1.6 (рис. 5), которое позволяет пользователю просматривать всю необходимую информацию, относящуюся к мотам и управляющему устройству. Программа позволяет смотреть маршрутную карту, то есть куда какой сигнал был послан и при помощи какого мота это было сделано. Это позволяет понять, каким образом информация достигает управляющего устройства. Программа также показывает напряжение, полученное с датчика, и время, когда информация была получена, что дает возможность более точно анализировать данные. SmartMesh Console позволяет, помимо прочего, устанавливать оповещения для определенных событий, то есть в случае превышения порогового значения или выхода из строя определенного мота сработает сигнализация.

Рис. 5. Приложение SmartMesh Console 1.6
Для управления данными последовательная передача настроена между управляющим устройством и ноутбуком. MATLAB используется для получения информации, ее обработки и преобразования получаемых значений напряжения в текущую температуру, дистанцию и скорость ветра. Взаимосвязь между значениями напряжения и соответствующими физическими значениями определяется спецификациями датчиков. Например, если используется датчик температуры, 0,23 В являются эквивалентом +23 °C, то есть получаемые значения напряжения умножаются на 100:
switch read
case '1' % Если получено значение «1», то это данные для первого мота
i=i+1;
if(i<=1000)
Volt_Mote1(i) = fread(s1,1,'float'); % Считываем
значение напряжения
TemperatureCelsius_Mote1(i) = Volt_Mote1(i) * 100 ;
else
Volt_Mote1(1)=[];
TemperatureCelsius_Mote1(1)= [ ];
Volt_Mote1(1000) = fread(s1,1,'float');
TemperatureCelsius_Mote1(1000) = Volt_Mote1(1000) * 100;
End
Когда все значения напряжения получены и сконвертированы в физические величины датчиков, итоговые данные отображаются в системном интерфейсе пользователя, показанном далее.
Системный интерфейс пользователя
Пользовательский интерфейс был разработан и внедрен при помощи MATLAB (рис. 6). В текущем варианте интерфейс включает четыре разные секции и показывает поступающие данные со всех мотов в реальном времени, визуализируя изменения физических параметров и обновляя графические представления.

Рис. 6. Системный интерфейс пользователя
Точнее говоря, первая секция предназначена для отображения передвижения крана в 2D, разделения пространства на отдельные участки и может одновременно визуализировать движения другого башенного крана, таким образом позволяя избежать аварии. Другими словами, если один кран попадает в зону действия другого ближайшего крана, то срабатывает автоматическое предупреждение оператора и краны должны начать перемещаться на более низкой скорости. Если же расстояние между кранами становится меньше допустимого значения, то срабатывает автоматическая система торможения.
Вторая секция пользовательского интерфейса — это температура. В основном, работа башенного крана должна быть приостановлена, если температура воздуха падает ниже –18 °C или поднимается выше +38 °C, либо используются другие значения, установленные производителем или инженером компании. Ограничения накладываются также и на кабину оператора крана. Кабины и станции удаленного контроля башенными кранами должны быть прогреты хотя бы до +15 °C в холодный период года.
Третья секция отображает интерфейс для контроля скорости ветра. Каждый изготовитель кранов устанавливает свои определенные значения скорости ветра, которые могут привести к аварии или повреждению крана. В основном, скорость ветра ниже 11 м/с или 25 миль/ч считается безопасной, в зависимости от установок производителя. Значение в 11 м/с было рассмотрено в данном исследовании и установлено в качестве порогового для скорости ветра. Как вторая, так и третья панели представляют собой группу статусов, которые срабатывают (начинают светиться красным), если заранее заданный предел температуры воздуха или скорости ветра превышен; в противном случае он светится зеленым.
Четвертая секция в данный момент предназначена для отображения дистанции между крюком и грузом. Точное значение показывается в нижнем углу экрана, в дополнение к двум другим окнам, позволяющим инженеру или работникам службы охраны труда представлять дистанцию ближнего и дальнего видов.
Итоги и обсуждение
Чтобы подтвердить эффективность сети передачи данных и пользовательского интерфейса для последующего применения на реальном башенном кране, как показано на рис. 7, были проведены испытания в лаборатории Американского университета Бейрута (АУБ).
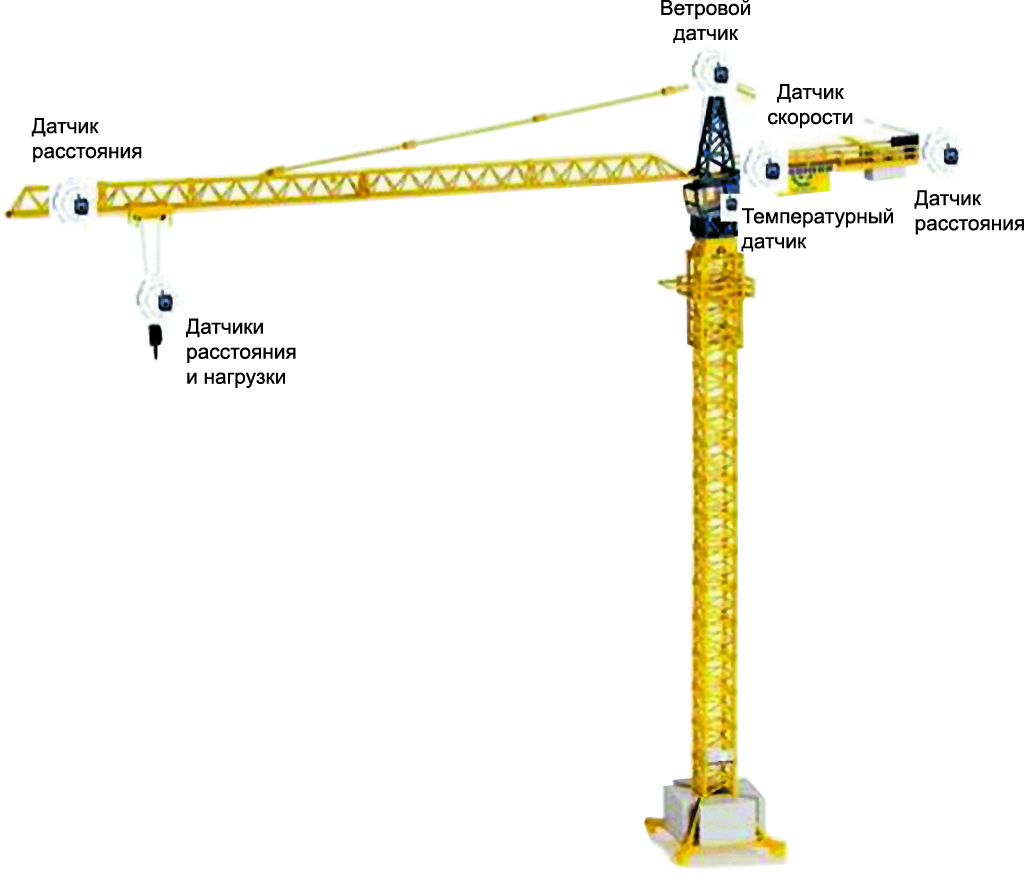
Рис. 7. Пример башенного крана, оборудованного датчиком
Для этого моты, оборудованные датчиками расстояния, температуры и ветра, были разделены на дистанции до 25 м между собой и закреплены на различных высотах для моделирования условий обычной строительной площадки, оснащенной башенными кранами. Некоторые опыты были произведены в определенных погодных условиях или включали ручное передвижение мотов, оборудованных датчиками расстояния, для проверки срабатывания системы оповещения. Значения напряжения датчиков передавались на аналоговые и цифровые входы мотов, и управляющее устройство могло считывать эти напряжения в течение длительного периода времени.
Приложение SmartMesh Console работало хорошо, отображая данные и информацию о беспроводных сигналах и общей работоспособности сети. MATLAB отлично справился с переводом и быстрой отправкой поступающих значений на пользовательский интерфейс, поддерживая информацию обновленной и включая систему оповещения по необходимости. Предварительные итоги опытов показаны на рис. 8, на котором можно увидеть пользовательский интерфейс в действии.

Рис. 8. Экспериментальный интерфейс пользователя
Результаты многообещающие и могут быть доработаны по части программного обеспечения и аппаратного комплекса. Сценарий предотвращения аварии башенных кранов, в частности, был задуман как простой способ использования датчика расстояния, для демонстрации его пригодности в обнаружении кранов, работающих на той же высоте. В любом случае, процесс более сложен в реальной жизни, и, помимо дальности, другие факторы, такие как скорость стрелы крана, ее направленность и др., должны быть приняты во внимание. Температурный датчик также выдает правильные значения, учитывая установленный порог, однако многие другие значения должны быть приняты во внимание при работе в других температурных условиях.
Выводы
Предложенная система с использованием беспроводной сенсорной сети нацелена на помощь строителям и службе охраны труда в принятии быстрых решений для предотвращения или уменьшения аварий. Предварительные результаты, освещенные в данном исследовании, являются тому подтверждением и демонстрацией того, что недорогая интеллектуальная система может быть использована для мониторинга работы башенных кранов на действующих стройплощадках с твердым покрытием, особенно в регионах, где меры безопасности не соблюдаются должным образом.
Дальнейшая работа будет нацелена на улучшение всей системы при помощи обновления текущих и установки новых недорогих датчиков, особенно если сценарии предотвращения аварий и разделения на зоны будут работать эффективно. Совмещенный передатчик поправок на ветер был недавно применен для измерения скорости ветра и его направления. Датчики ориентации (3DOF) или блок инерциальных датчиков (IMU) для слежения за вращением стрелы крана, колебаниями и скоростью будут также использованы и впредь. Датчики нагрузки на крюк также понадобятся для проверки максимальной нагрузки на кран. Кроме того, интерфейс будет обновлен для отображения большего количества интерактивных панелей, способных быстро включать звуковые оповещения, таким образом помогая инженерам, операторам кранов и строителям правильно реагировать на события и, при необходимости, останавливать кран.
Следующие шаги включают в себя тестирование всей системы, со всеми текущими и новыми датчиками, на двух различных образцах башенных кранов. Определенное количество экспериментов будет проведено для определения наилучшего положения датчиков для всех возможных сценариев и получения положительных результатов. Работоспособность системы будет оценена на настоящем башенном кране, расположенном на одной из стройплощадок Американского университета Бейрута. Разумеется, подобные улучшения и любая другая работа над этой системой будут направлены на обеспечение автоматизации некоторых задач мониторинга и работы в области строительства.
- Bal M., Xue H., Shen W., Ghenniwa H. A Testbed for Localization and Tracking in Wireless Sensor Networks // IEEE International Conference on Systems, Man, and Cybernetics. San Antonio, Texas. 2009.
- Cisco Secure Wireless Plant: Security and Quality of Service for Industrial Environments. 2008. www.cisco.com/web/strategy/docs/manufac-turing/SWP_Industrial_Environments.pdf /ссылка утеряна/
- Czubak A., Wojtanowski J. On Applications of Wireless Sensor Networks, Internet-Technical Development and Applications, Springer. 2009.
- Dust Networks. 2013.
- Guo Q., Zhang H. Intelligent Real-Time Monitoring System of Tower Crane Load Moment // Proceedings of the 3rd International Workshop on Intelligent Systems and Applications (ISA). 2011.
- Irizarry J., Karan E. Optimizing Location of Tower Cranes on Construction Sites through GIS and BIM Integration // Journal of Information Technology in Construction (ITcon). 2012.
- Isherwood R. Tower crane incidents worldwide. 2010.
- Jang W. S., Healy W. M. Wireless Sensor Network Performance Metrics for Building Applications // Energy and Buildings. 2010. № 42 (6).
- Lee U., Kang K., Kim G., Cho H. Improving Tower Crane Productivity Using Wireless Technology // Computer-Aided Civil and Infrastructure Engineering. 2006. № 21 (8).
- Neitzel R., Seixas N., Ren K. A review of crane safety in the construction industry. 2001. http://depts.washington.edu/frcg/content/NeitzelCraneSafetyReview.pdf /ссылка утеряна/
- Schmid T., Dubois-Ferri H., Vetterli M. Sensor Scope: Experiences with a Wireless Building Monitoring Sensor Network // Proceedings of the Workshop on Real-World Wireless Sensor Networks. Stockholm. 2005.
- Shapira A., Lyachin B. Identification and Analysis of Factors Affecting Safety on Construction Sites with Tower Cranes // Journal of Construction Engi-neering and Management. 2009. № 135 (1). ASCE.
- Shapira A., Glascock J. Culture of Using Mobile Cranes for Building Construction // Journal of Construction Engineering and Management. 1996. № 22 (4). ASCE.
- Shen X., Chen W., Lu M. Wireless Sensor Networks for Resources Tracking at Building Construction Sites // Tsinghua Science and Technology. 2008.
- Zheng X., Zhang H., Xie Z. Design of Wireless Monitoring System Based on CAN Bus and ZigBee Technology of Tower Crane // Informatics in Control, Automation and Robotics, Springer. 2011.
- Zheng X., Liu S., Li B. A low-delay medium access control mechanism of WSN for tower crane group // 9th World Congress on Intelligent Control and Automation (WCICA). 2011.
 3 июня, 2010
3 июня, 2010 11 декабря, 2008
11 декабря, 2008 29 ноября, 2019
29 ноября, 2019