
Использование новых программных функций в модулях спутниковой навигации
Компания SIMCom Wireless Solutions, производитель беспроводных M2M GSM/GPRS, 3G, LTE и GPS/ГЛОНАСС-решений, реализовала непосредственно в навигационных модулях SIMCom на базе чипсета MT3333 поддержку новых PSIM-команд и функций на уровне программного обеспечения (ПО): контроль геозон, пройденного пути, скорости перемещения и т. д.
Полный список новых функций обновленного ПО:
- контроллер скорости перемещения и оповещения о превышении скорости;
- задание геозон и контроль перемещения между ними;
- счетчик пройденного пути (одометр);
- выдача информации о текущем местоположении по запросу;
- выдача по запросу информации о последнем месте определения точных 3D-координат;
- изменение способа выдачи потока NMEA-сообщений: обычный либо периодическая выдача только одного сообщения с основными навигационными данными;
- включение вывода дополнительной отладочной информации;
- задание скорости работы UART-модуля;
- просмотр информации о серийном номере навигационного приемника;
- управление сигналом PPS — задание скважности и признака, по которому этот сигнал будет выдаваться;
- управление GPIO-портами модуля;
- определение наличия/отсутствия подключения антенны.
Перечисленный выше функционал поддержан в последних прошивках актуальных навигационных модулей SIMCom на базе чипсета MT3333 (таблица). Рассмотрим подробнее несколько новых функций.
|
SIM68R |
SIM68V |
SIM68M* |
SIM68E* |
SIM33ELA** |
|
|
|
|
|
|
|
Размеры, мм |
||||
|
22,4×17×2,7 |
16×12,2×2,4 |
10,1×9,7×2,5 |
13×15×2,3 |
14×9,6×2,15 |
|
Потребление в режимах слежения/захвата/AlwaysLocate, мА |
||||
|
27 / 34 / 0,2 |
30 / 34 / 0,34 |
22 / 26 / 0,34 |
20 / 25 / 0,34 |
20 / 25 / TBD |
|
Чувствительность в режиме слежения/захвата, дБм |
||||
|
–167/–157 |
–165/–160 |
|||
|
TTFF, с |
||||
|
Cold — 28; EPO Assist — 13; Hot — менее 1 |
||||





Примечания: * — новый; ** — новый, с чип-антенной
Контроллер геозон
Контроллер геозон (geofences) позволяет оповещать управляющее устройство как о проникновении, так и о выходе модуля из некоего ограниченного участка (геозоны). Он используется в таких приложениях, как наблюдение за перемещениями детей и пожилых людей, для определения факта пересечения автомобилем зоны стоянки и т. п.

Рис. 1. Пример задания геозоны по 4 точкам
Полезной особенностью навигационных решений от компании SIMCom является то, что перенос функций контроллера геозон непосредственно в навигационный приемник позволяет:
- уменьшить время, необходимое на разработку, так как программисту нет необходимости реализовывать эти функции на внешнем микроконтроллере;
- использовать менее производительный, а следовательно, более бюджетный управляющий микроконтроллер;
- уменьшить энергопотребление устройства в целом, поскольку появляется возможность переводить внешний микроконтроллер и другие компоненты в режим сна до появления сообщений от навигационного модуля;
- уменьшить габариты и стоимость готового устройства за счет использования менее емких АКБ и более простых управляющих микроконтроллеров.
Программное обеспечение SIMCom поддерживает контроль до 10 геозон. Существует несколько способов их задания:
- круг — задать центр и радиус либо задать центр и точку на окружности;
- треугольник — по трем точкам;
- четырехугольник — по четырем (рис. 1).
Контроллер скорости
Контроллер скорости (speed alarm) можно настроить для информирования управляющего устройства как о превышении скоростного порога, так и о понижении.
Актуальное ПО позволяет:
- задать до четырех пороговых значений скоростей;
- задать событие для оповещения, например превышение или понижение скорости;
- опросить состояние контроллера скорости.
Применение встроенных функций контроля скорости может найти применение:
- в трекерах — для контроля за соблюдением скоростного режима коммерческого, пассажирского и грузового автотранспорта;
- в велокомпьютерах — включение устройства при превышении установленного порога скорости;
- в автостраховании и видеорегистраторах — получение и фиксация актуальных данных о скорости на момент ДТП.
Одометр (odometer)
Измерение пройденного пути навигационным модулем без помощи внешнего микроконтроллера осуществляется путем вычисления расстояния между точками текущего и предыдущего достоверно определенного местоположения. Достаточно включить функцию одометра, и модуль начнет аккумулировать пройденный путь. Показания одометра можно прочитать, подав на модуль соответствующую команду. Также существует дополнительная команда, позволяющая задать текущее значение пройденного пути либо его сбросить.
Функция одометра найдет применение в приложениях контроля пройденного пути и расхода топлива автотранспорта, а также в велосипедных компьютерах, одометрах для бегунов и др.
Наличие перечисленных функций в навигационном модуле «из коробки» позволяет значительно упростить процесс разработки устройства, обеспечивая при этом впечатляюще широкий и гибкий функционал.
Практические примеры
Рассмотрим работу новых функций на примере модуля SIM33ELA (рис. 2). Этот модуль со встроенной чип-антенной отлично зарекомендовал себя в ходе полевых испытаний, подтвердил высокие для этого класса устройств показатели чувствительности и устойчивости функционирования.

Рис. 2. Модуль SIM33ELA
Испытания проводились с помощью отладочного комплекта для GNSS-модулей SIMCom и установленной на нем мезонинной платы с модулем SIM33ELA. Отладочная плата располагалась на дне багажника легкового автомобиля. Данные, поступавшие от навигационного приемника, записывались на ноутбук. Впоследствии, по полученному NMEA-логу, генерировались треки для их просмотра и анализа в приложении Google «Планета Земля» (рис. 3).
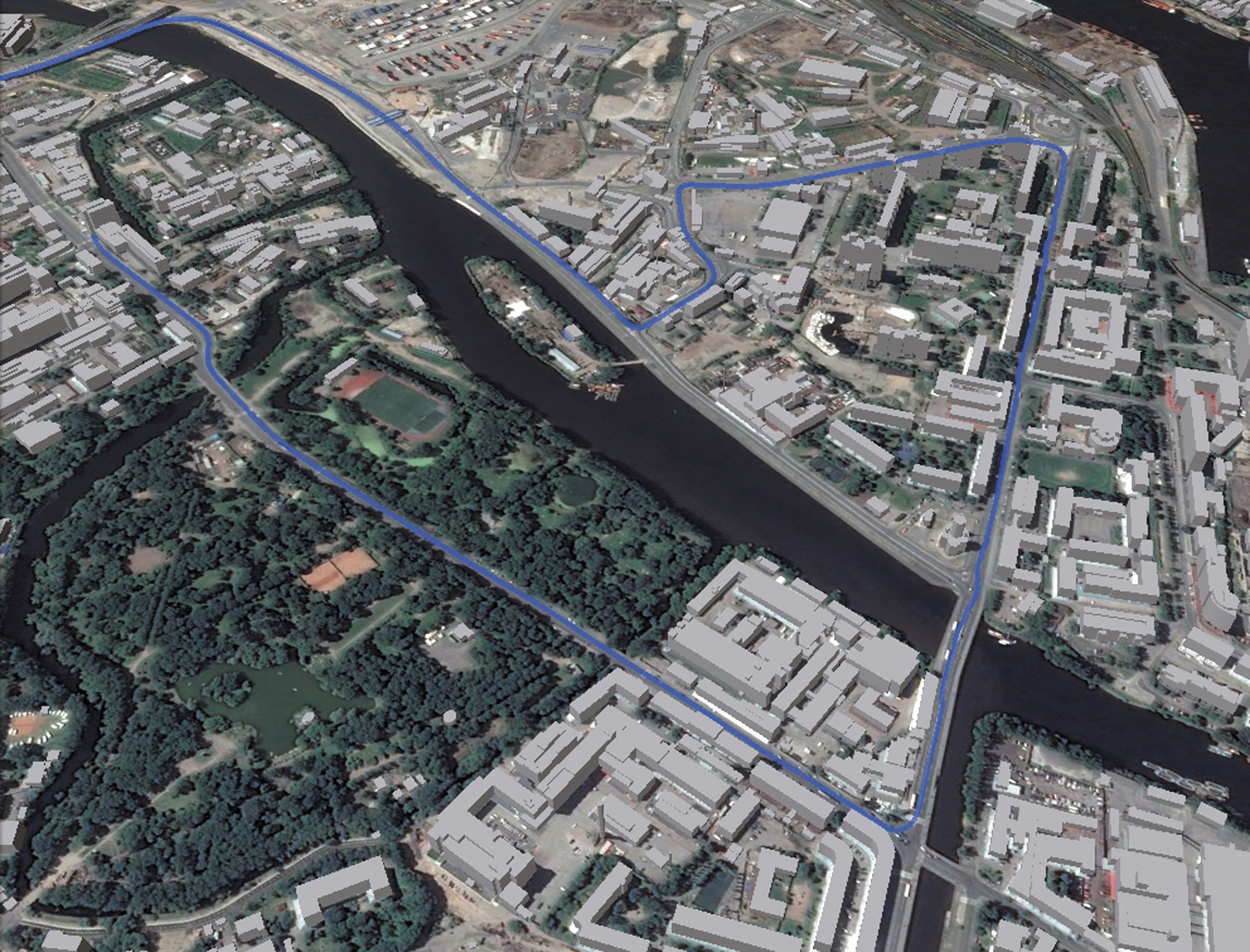
Рис. 3. Пример трека, получаемого модулем SIM33ELA, расположенным в багажнике легкового автомобиля
Выборку данных с результатами полевых испытаний можно найти на сайте «МТ-Систем» в разделе новостей по беспроводному оборудованию, полную версию можно запросить у специалистов технической поддержки, написав по адресу wireless@mt-system.ru
Контроллер геозон
Зададим геозону в виде круга с центром в точке размещения офиса компании «МТ-Систем» (рис. 4). Включим оповещения как о вхождении в зону, так и о выходе из нее.

Рис. 4. Геозона, заданная как круг с радиусом 100 м с центром в точке расположения офиса «МТ-Систем»
Команда $PSIMGEO,W,7,3,1,, 59.897144, 30.253169,100,0,0,0,0,0,0,0*02 задает геозону, где:
- «7» — ID геозоны;
- «3» — докладывать как о входе, так и о выходе из геозоны;
- «1» – геозона будет задана как круг — центральной точкой и радиусом;
- «59.897144, 30.253169» — координаты центра круга;
- «100» — радиус круга.
Команда $PSIMMOD,W,1*27 включает Tracker mode, а после подачи команды $PMTK101*32 осуществляется перезагрузка,чтобы изменения вступили в силу.
При вхождении модуля в геозону появляется сообщение:
$PSIMGEO,U,7,1,2,D140808T052130.000,59.898366,30.254444,0.73,66.77,207.09,2,,0.63,1.19,1.01,,21,10,,,,5.1,5.8*06
Разберем его подробно:
- $PSIMGEO,U — префикс URC-сообщения;
- «7» — ID геозоны;
- «1» — статус события (в данном случае — вхождение в геозону);
- «2» — статус фиксации координат (в данном случае — 3D-фиксация);
- «D140808T052130.000» — дата и время в UTC;
- «59.898366,30.254444» — координаты вхождения в геозону;
- «0.73» — высота над уровнем моря, м;
- «66.77» — текущая скорость движения, км/ч;
- «207.09» — текущее направление, град.;
- «2» — признак, что координаты определены достоверно;
- «0.63,1.19,1.01» — параметры снижения точности HDOP, PDOP и VDOP соответственно;
- «21,10» — количество видимых спутников и количество спутников, по которым было принято навигационное решение;
- «5.1,5.8» — параметры HPA и VPA — точность определения горизонтального и вертикального местоположения, м.
Как вариант, этот функционал может быть использован в системах контроля доступа.
Например, построив на SIM33ELA миниатюрный компактный персональный трекер, можно вести учет посещения фирмы сотрудниками или подсчитывать число заездов автотранспорта на территорию. При этом, если организовать работу устройства так, что оно будет выходить из состояния сна только при появлении сообщений от навигационного модуля, можно будет обеспечить высокую степень автономности и бóльшую продолжительность работы устройства от аккумуляторной батареи. Для этого достаточно будет активировать AlwaysLocate Sleep Mode и выводить управляющий MCU из состояния сна по приходу URC-сообщений от навигационного модуля (рис. 5).
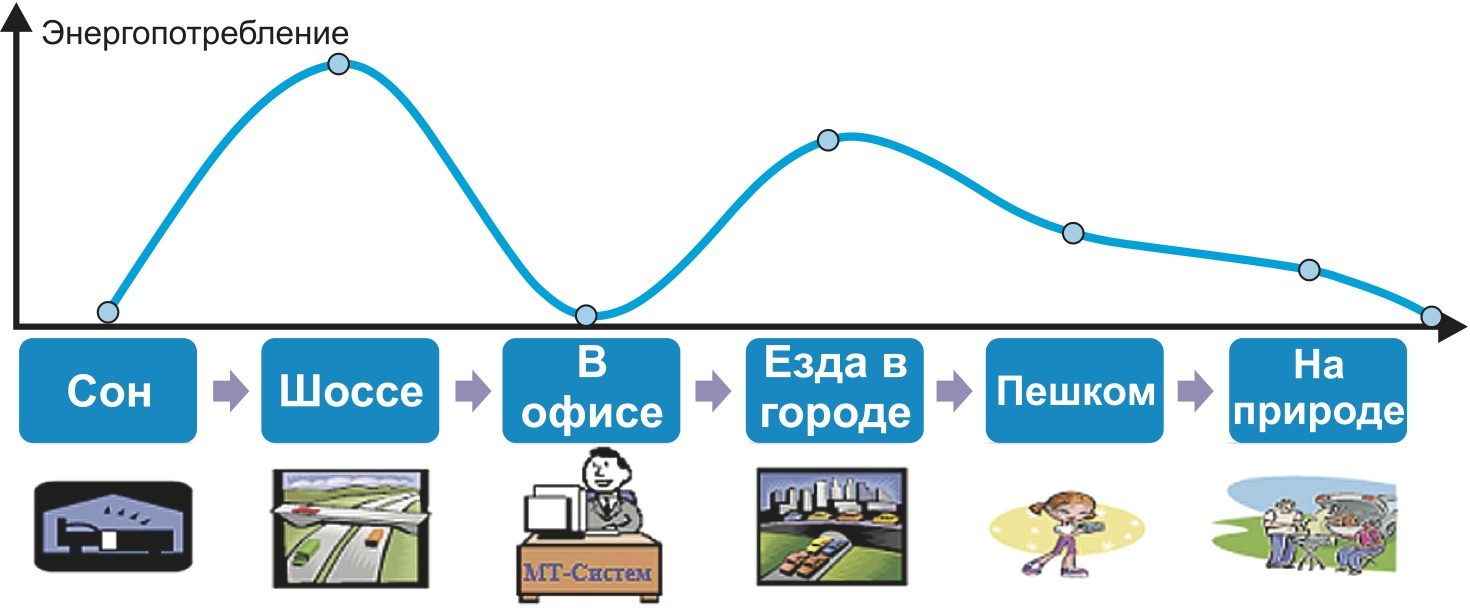
Рис. 5. Энергопотребление при использовании фирменной технологии AlwaysLocate
Контроллер скорости
Рассмотрим возможности встроенных функций контроллера скорости. Для этого подадим на модуль команду $PSIMSPD,W,2,5,2,65,2,95,1,2*30. Зададим сразу все четыре пороговые значения скорости:
- «2,5» — оповещать, когда скорость превысила 5 км/ч. Это можно использовать для определения факта начала движения объекта.
- «2,65,2,95» — выдавать оповещения, когда скорость превысит 65 и 95 км/ч соответственно.
- «1,2» — включить выдачу оповещений в случаях, когда скорость упала ниже 2 км/ч. По этому событию будем определять факт остановки транспортного средства.
При превышении установленного скоростного порога навигационный модуль выдает сообщение:
$PSIMSPD,U,1,2,5.00,2,2,D140808T052042.000,59.906058,30.261877,1.27,5.12,201.02,2,,0.66,1.26,1.07,,18,9,,,,6.3,5.9*20
Здесь $PSIMSPD,U — преамбула, индицирующая, что произошло событие; «1,2,5.00,2» — произошло превышение первого порогового значения (согласно настройкам сообщать о превышении скорости в 5 км/ч).
Далее следуют навигационные параметры, формат которых был описан ранее.
Проверить, не превышен ли какой-либо из установленных скоростных порогов, можно в любой момент, подав команду $PSIMSPD,Q*3D. От модуля будет получен ответ следующего вида:
$PSIMSPD,Q,Ok,2,5.00,1,2,65.00,1,2,95.00,1,1,2.00,1*3E,
где после преамбулы следует информация о каждом пороговом значении и его статусе в формате <alarm mode>,<alarm speed>,<status>. Как можно видеть, <status> каждого из пороговых значений равен «1», то есть превышения нет.
Контроллер пройденного пути
Для активации функций пройденного пути достаточно перевести модуль в Tracker mode и перезапустить его. При этом модуль начнет аккумулировать данные о пройденном пути как сумму элементарных перемещений. Запросить эти данные можно командой $PSIMODO,R*3D. В ответ от модуля получаем сообщение $PSIMODO,R,Ok,2197.27*3F. Это означает, что на текущий момент модуль переместился на 2197,27 м.
Представим ситуацию, что автомобиль въезжает в тоннель или на крытую парковку. В условиях недостаточного сигнала навигационному приемнику проблематично достоверно определить свое местоположение. На этот случай существует возможность, подкорректировав показания одометра данными из альтернативных источников, задать значение пройденного пути командой $PSIMODO,W,<distance>. Эта команда при необходимости может быть использована для обнуления показаний счетчика пройденного пути.
Особенности реализации устройств на основе модуля SIM33ELA
Преимущества использования компактного модуля SIM33ELA со встроенной чип-антенной и дополнительным функционалом встроенного программного обеспечения:
- экономия времени на разработку, поскольку многие необходимые функции уже поддержаны модулем;
- экономия ресурса управляющего MCU за счет перекладывания части функций на навигационный приемник;
- экономия на элементах питания в результате использования гибких режимов энергосбережения;
- уменьшение габаритов и веса готового устройства за счет использования компактного навигационного решения и аккумуляторной батареи меньшей емкости, а также благодаря тому, что модуль со встроенной чип-антенной занимает гораздо меньше места, чем отдельный модуль и антенна;
- отсутствие необходимости согласования ВЧ-части антенны и модуля;
- отсутствие необходимости встраивать в устройство дополнительный МШУ и ПАВ-фильтр, т. к. они уже входят в состав модуля;
- экономия на стоимости: модуль со встроенной антенной обходится дешевле, чем модуль и антенна, использованные в решении по отдельности.
Опыт практического использования модулей SIM33ELA в реальных проектах
Отличительные особенности представленных ниже разработок: удобство использования; надежность функционирования; комплексность; расширенный функционал; приемлемая цена. Во многом они реализованы за счет корректного и взвешенного выбора использованных в них радиомодулей, а также тщательного тестирования их работы на этапе дизайна разрабатываемого решения.
Устройство Oriense 2
Компания Oriense, разрабатывающая высокотехнологические устройства помощи людям с расстройством зрения, является резидентом Сколково, неоднократным призером российских и международных технологических конкурсов. Опытный образец первого устройства прошел активное тестирование в Обществах слепых Москвы и Петербурга и получил положительные отзывы.

Рис. 6. PCB устройства для помощи слепым и слабовидящим людям Oriense 2
Осенью 2014 г. компания Oriense планирует выпустить устройство, объединяющее компьютерное зрение и навигационные технологии (рис. 6). В Oriense 2 реализованы две технологии навигации — локальной, на базе 3D-сенсора, и глобальной — на базе GPS/GLONASS-модуля. Для разработчиков компании Oriense выбор такого модуля стал сложной задачей, так как одним из основных требований потенциальных потребителей устройства являлась интеграция в разрабатываемую систему наиболее качественного устройства глобальной навигации, компактного, но максимально устойчиво сохраняющего работоспособность в различных условиях. Основываясь на информации о тестировании модуля, предоставленной специалистами «MT-Систем», и на результатах собственного тестирования, разработчики остановили выбор на модуле SIM33ELA. Помимо полного соответствия заявленным характеристикам и оптимальным размерам, модуль продолжает успешно функционировать в сложных условиях (вблизи зданий или на окнах помещений, в багажнике автомобиля и т. д. и т. п.), в то время как другие модули либо вообще перестают «видеть» спутники, либо начинают «дезинформировать» потребителя, ошибаясь на десятки метров.
Поисковый маяк «Антарес-М»

Рис. 7. Плата поискового маяка «Антарес-М»
ООО «СмартИнТех» — компания, работающая в области проектирования, производства, внедрения и сопровождения систем спутникового мониторинга. Опытный образец первого устройства — поисковый маяк «Антарес-М» — в настоящее время проходит испытания.
Основной задачей маяка является определение географических координат своего местоположения с помощью спутников ГЛОНАСС/GPS по одной или шести базовым станциям GSM и передача их в виде интернет-ссылки через SMS на мобильный телефон пользователя и/или по каналу связи GPRS на сервер связи. Устройство позволяет осуществлять удаленную настройку с помощью команд по SMS с телефона либо по каналу GPRS с сервера, а также удаленно обновлять ПО. Важной характеристикой является полное радиомолчание в «спящем» режиме. Исходя из критериев выполнимости перечисленного функционала разработчики компании выбрали для использования в «Антарес-М» модуль SIM33ELA (рис. 7).
Богатый функционал, надежность, низкие показатели энергопотребления и устойчивость работы, а также приемлемые ценовые показатели позволяют сделать выбор в пользу SIM33ELA и других GPS/ГЛОНАСС-модулей производства SIMCom Wireless Solutions, позволяющих реализовать недоступную ранее функциональность и возможности, минимизировать размеры разрабатываемых устройств и затраты на их производство.
- http://www.vis-plus.ee/pdf/SIM33ELA_Hardware%20Design_V1.00.pdf
- MT3333 Platform NMEA Message Specification For GPS+GLONASS V1.01.pdf
- PSIM Command for MTK GNSS Platform V1.02.pdf
- SIM68_EVB kit_User Guide_V1.01.pdf
- http://smartintech.ru/
- http://transportmonitoring.ru/
- http://oriense.com
 12 февраля, 2020
12 февраля, 2020 14 июля, 2009
14 июля, 2009 5 марта, 2020
5 марта, 2020