

Многоканальные распределенные системы радиомониторинга TORNADO-RxMTCA
Модульный принцип построения аппаратуры радиомониторинга
Одним из наиболее перспективных методов построения распределенных в пространстве многоканальных и многофункциональных широкополосных систем радиоконтроля и радиомониторинга является модульный принцип.
В отношении аппаратной части модульный принцип предполагает использование стандартных готовых аппаратных модулей радиоприема, обработки и передачи данных, причем предпочтительно, чтобы все аппаратные компоненты системы соответствовали современному и перспективному промышленному международному стандарту построения аппаратуры в стандартных конструктивах и с использованием стандартных высокоскоростных интерфейсов передачи информации. Это позволит минимизировать стоимость аппаратуры и ее обслуживание за счет применения стандартных аппаратных компонентов, даже несмотря на возможную незначительную аппаратную избыточность. Дальнейшее использование внутрикорпоративных стандартов интерфейсов и конструктивов представляется бесперспективным.
Модульный принцип обязательно должен распространяться и на структуру программного обеспечения (ПО) системы, состоящей из набора стандартных программных модулей управления сканированием, обработки и передачи данных, анализа результатов. Все ПО-модули должны взаимодействовать между собой через стандартные программные интерфейсы.
При соответствии указанным выше нормам модульный принцип построения системы многоканального радиомониторинга позволит заказчику быстро компоновать и переконфигурировать систему радиомониторинга в соответствии с конкретными требованиями, а при необходимости наращивать ее с помощью дополнительных аппаратных и/или программных модулей. При этом изначальные инвестиции всегда будут работать на решение текущих задач.
Отвечая современным веяниям, компания «Радиосервис» (www.radioservice.ru), разработчи к и производитель РЧ-аппаратуры и систем радиомониторинга, и фирма «МикроЛАБ Системс» (www.mlabsys.ru), разработчик и изготовитель аппаратуры цифровой обработки сигналов (ЦОС), объявили о совместном выпуске принципиально новой линейки аппаратуры радиомониторинга TORNADO-RxMTCA с модульным принципом построения на базе аппаратно-программных и конструктивных требований современных стандартов PICMG 3.0, AMC.0 и MicroTCA.0, позволяющей клиентам быстро и самостоятельно менять конструктив и назначение изделия от компактного автономного устройства до многоканальной пространственно распределенной системы в соответствии с поставленными задачами, с полным сохранением функционала и без дополнительных финансовых вложений.
На сегодня новейшие промышленные стандарты PICMG AMC.0 и MicroTCA.0 (www.picmg.org), предназначенные для построения модульной телекоммуникационной аппаратуры, являются наиболее перспективными в плане компактности, модульности, состава и скорости внутренних межмодульных сериальных интерфейсов (10Gbps, 40Gbps, 100Gbps), а также высокой надежности за счет резервирования и горячей замены. Аппаратура стандарта MicroTCA широко применяется для построения базовых станций сотовой связи и беспроводного доступа 3G и 4G.
Пример многоканальной распределенной системы радиомониторинга на базе линейки TORNADO-RxMTCA представлен на рис. 1. Система включает четыре удаленных компактных устройства многоканального радиомониторинга TORNADO-RxmMTCA, которые через интерфейсы 1GbE LAN, оптоволоконные линии 10GbE и IP-сеть связаны с центральной станцией обработки и управления на базе устройства TORNADO-RxMTCA или TORNADO-MTCA.
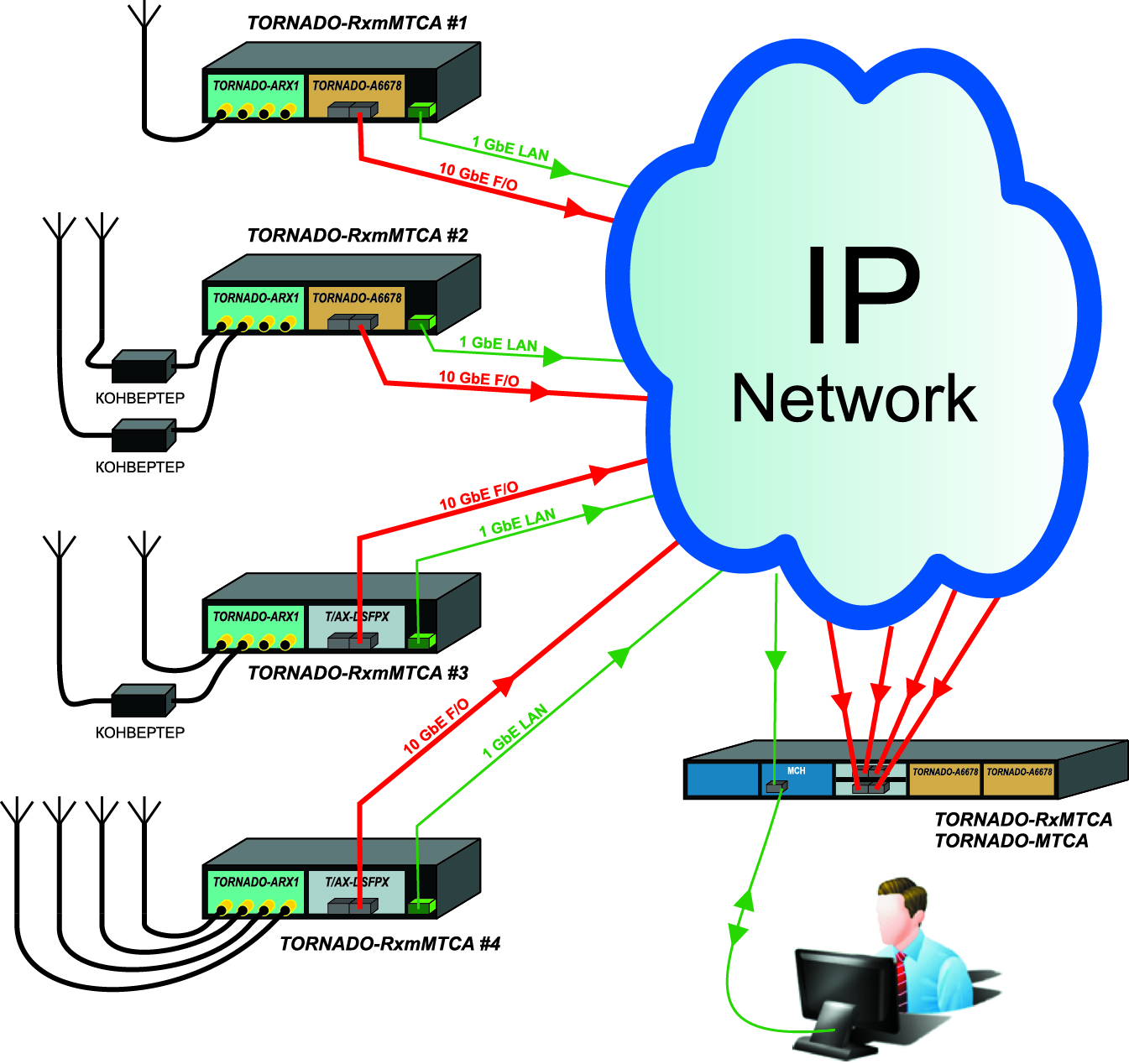
Рис. 1. Пример структурной схемы распределенной системы многоканального радиомониторинга на базе линейки аппаратуры TORNADO-RxMTCA
Компоненты линейки аппаратуры TORNADO-RxMTCA
Линейка аппаратуры радиомониторинга TORNADO-RxMTCA построена на базе новейшего AMC-модуля TORNADO-ARX1 (рис. 2) многоканального радиомониторинга (9 кГц – 3 ГГц) и ЦОС совместной разработки компании «Радиосервис» и фирмы «МикроЛАБ Системс», выполненного в стандарте PICMG AMC.0 R2.0 (Advanced Mezzanine Card). Для расширения входного диапазона частот к AMC-модулю TORNADO-ARX1 опционально подключаются внешние командно-управляемые конвертеры 6, 12, 21 и 40 ГГц фирмы «Радиосервис».

Рис. 2. Структурная схема AMC-модуля многоканального радиомониторинга TORNADO-ARX1
Другими модульными компонентами построения линейки аппаратуры радиомониторинга TORNADO-RxMTCA являются супервысокопроизводительные AMC-модули ЦОС/ПЛИС TORNADO-A6678 (рис. 3) фирмы «МикроЛАБ Системс» с 8‑ядерными процессорами ЦОС Texas Instruments TMS320C6678 и ПЛИС Xilinx Virtex‑7, AMC-модули T/AX-DSFPX (рис. 4) фирмы «МикроЛАБ Системс» дальней сетевой 10GbE оптоволоконной коммуникации, а также стандартные инфраструктурные компоненты модульных систем стандарта PICMG MicroTCA.0 R1.0 (Micro Telecommunications Computing Architecture), включающих разнообразные шасси MicroTCA (рис. 5), модули управляющих контроллеров MCH (рис. 6), eMCH со встроенными высокоскоростными неблокирующими коммутаторами потоков 10 GbE и модули источников питания PM (рис. 7).

Рис. 3. Супервысокопроизводительный AMC-модуль ЦОС/ПЛИС TORNADO-A6678

Рис. 4. AMC-модуль дальней сетевой 10 GbE оптоволоконной коммуникации T/AX-DSFPX-A

Рис. 5.
а) Стандартное 19″ 1U шасси MicroTCA;
б) мини-шасси MicroTCA

Рис. 6. Управляющий модуль (MCH) для систем MicroTCA с высокоскоростным коммутатором потоков 10GbE

Рис. 7. Модуль источника питания (PM) переменного тока для систем MicroTCA с выходной мощностью 600 В
AMC-модуль многоканального радиомониторинга TORNADO-ARX1
AMC-модуль TORNADO-ARX1 (рис. 2) содержит субмодуль мониторингового РЧ-приемника (9 кГц – 3 ГГц) разработки фирмы «Радиосервис» и несущий AMC-модуль разработки фирмы «МикроЛАБ Системс».
РЧ-приемник имеет структуру классического супергетеродинного приемника с двойным преобразованием частоты и полосой ПЧ 24 или 70 МГц, включая систему преселекторов.
Несущий AMC-модуль включает четыре 16‑разрядных АЦП (A/D), управляемый генератор частоты выборки с малыми шумами и высокой стабильностью (Fs), ПЛИС, опциональные внешние порты 10+ Gbps SFP+ и LAN 1GbE RJ‑45, а также системный контроллер модуля (MMC) и вторичный источник питания (P/S). ПЛИС содержит функции высокоскоростного процессора ЦОС (ПЦОС), управляющего контроллера для ПЦОС и РЧ-приемника, двух скоростных AMC-интерфейсов межмодульного обмена (Fabric-D/E/F/G AMC.2 10GBASE-BX4 и 40GBASE-CX4, AMC.4 4x 5Gbps Serial RapidIO, AMC.1 4x 5Gbps PCIe), управляющего LAN-порта #0 Fabric-A 1GbE AMC-интерфейса, а также опциональных внешних портов SFP+ и LAN.
Скорость радиомониторинга АМС-модуля TORNADO-ARX1 достигает 160 ГГц/с, что позволяет регистрировать очень короткие РЧ-сигналы и впоследствии дистанционно скачивать и анализировать их из памяти модуля.
Прикладное ПО AMC-модуля TORNADO-ARX1 построено по модульному принципу и включает программные модули радиосканеров, спектрального анализа, обнаружителей различных сигналов и измерения их параметров, демодуляторов и т. д. Необходимые для работы ПО-модули загружаются во FLASH-память AMC-модуля по любому из LAN-портов и автоматически запускаются в нужной конфигурации при включении питания. Состав ПО-модулей определяется функциональным назначением конкретного изделия. При необходимости заказчик может приобретать дополнительные ПО-модули.
Модульные устройства многоканального радиомониторинга TORNADO-RxMTCA
На базе АМС-модуля TORNADO-ARX1 достаточно просто строить многоканальные системы радиомониторинга, а также многопозиционной пеленгации источников сигнала.
Фото простейшего компактного устройства TORNADO-RxmMTCA удаленного многоканального радиомониторинга представлено на рис. 8.
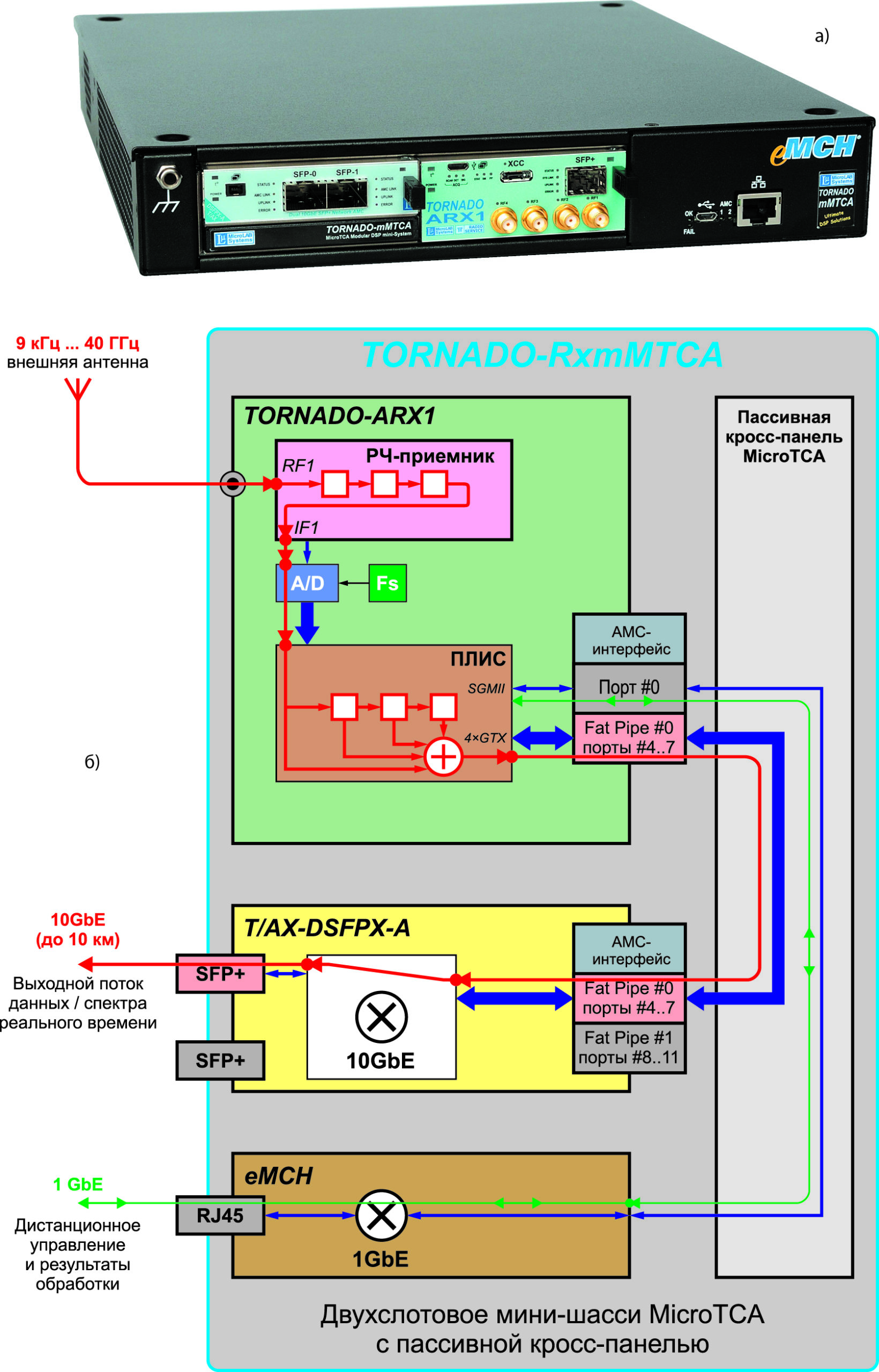
Рис. 8. Компактное устройство удаленного многоканального радиомониторинга TORNADO-RxmMTCA на базе AMC-модуля TORNADO-ARX1, коммуникационного AMC-модуля T/AX-DSPX-A и двухслотового мини-шасси MicroTCA:
а) внешний вид;
б) блок-схема
Устройство включает AMC-модуль TORNADO-ARX1 с опциональными внешними конвертерами 6, 12, 21 и 40 ГГц, AMC-модуль T/AX-DSFPX-A дальней сетевой 10GbE оптоволоконной коммуникации на расстояния до 10 км, а также двухслотовое мини-шасси MicroTCA с «пассивной» кросс-панелью без коммутатора потоков. Размеры устройства составляют 24032043 мм при весе около 2 кг. Устройство управляется дистанционно через IP-сеть и 1GbE LAN-порт шасси (в том числе и через Wi-Fi), а РЧ-данные реального времени и результаты обработки передаются через одно или два оптоволоконных соединения 10GbE на расстояния до 10 км с помощью коммуникационного AMC-модуля T/AX-DSFPX.
Простейшая организация потоков данных внутри устройства предусматривает передачу необработанного оцифрованного РЧ-потока с выхода ПЧ-приемника и блока обработки данных (многоканальные DDC, обнаружители, демодуляторы, трекеры и т. п.) в виде одного суммарного потока через порт Fat Pipe #0 AMC-интерфейса AMC-модуля TORNADO-ARX1 в соответствующий Fat Pipe порт коммуникационного AMC-модуля T/AX-DSFPX-A и далее через 10GbE SFP+ порт и оптоволоконную линию на расстояние до 10 км в центр обработки. В зависимости от конкретного приложения возможны и другие варианты организации потоков через оба порта Fat Pipe #0 и #1 AMC-интерфейсов AMC-модулей TORNADO-ARX1 и T/AX-DSFPX-A с задействованием обоих 10GbE SFP+ портов. Конфигурация потоков данных определяется загруженным ПО AMC-модуля TORNADO-ARX1.
Неограниченное число таких устройств может быть объединено в единую систему радиомониторинга с общим центром обработки. Благодаря поддержке протокола PTP AMC-модулями TORNADO-ARX1 и T/AX-DSFPX вся система синхронизируется в едином времени с точностью до нескольких наносекунд, что позволяет строить на их основе и системы пеленгации.
От описанного выше простейшего устройства можно перейти к более сложному супервысокопроизводительному устройству радиомониторинга TORNADO-RxMTCA с мощной локальной ЦОС, внешний вид и блок-схема которого представлены на рис. 9.

Рис. 9. Устройство удаленного многоканального радиомониторинга TORNADO-RxMTCA на базе двух AMC-модулей TORNADO-ARX1, AMC-модуля ЦОС/ПЛИС TORNADO-A6678, коммуникационного AMC-модуля T/AX-DSPX-A и шестислотового 19″ 1U шасси MicroTCA с коммутатором потоков 10GbE:
а) внешний вид;
б) блок-схема
Это дистанционно управляемое устройство включает два AMC-модуля TORNADO-ARX1 многоканального радиомониторинга с опциональными внешними конвертерами 6, 12, 21 и 40 ГГЦ, супервысокопроизводительный AMC-модуль ЦОС/ПЛИС TORNADO-A6678, AMC-модуль T/AX-DSFPX дальней сетевой 10GbE оптоволоконной коммуникации на расстояния до 10 км и стандартное 6‑слотовое 19″ 1U шасси MicroTCA с модулем управляющего контроллера MCH с коммутатором потоков 10GbE и модулем питания PM. Аналогично описанному выше простейшему устройству, управление таким решением осуществляется дистанционно через IP-сеть и 1GbE LAN-порт шасси, а данные реального времени и результаты обработки передаются через четыре оптоволоконных соединения 10GbE на расстояния до 10 км, подключаемых к портам SFP+ AMC-модуля T/AX-DSFPX и управляющего контроллера MCH.
Концепция MicroTCA предполагает, что потоки данных всех AMC-интерфейсов внутри такого устройства MicroTCA замыкаются на центральный коммутатор 10GbE управляющего контроллера MCH, который позволяет создавать и конфигурировать локальные подсети и изолировать потоки данных 10GbE друг от друга в зависимости от конкретного приложения. Пример организации потоков данных (рис. 9б) внутри этого устройства включает маршрутизацию исходных ПЧ-потоков с выходов каждого из AMC-модулей радиомониторинга TORNADO-ARX1 через порты Fat Pipe #1 соответственно в порты Fat Pipe #0 и #1 AMC-интерфейса AMC-модуля ЦОС/ПЛИС TORNADO-A6678 для комплексной многоканальной ЦОС внутри TORNADO-A6678 с использованием его суперпроизводительного 8‑ядерного процессора ЦОС TMS320C6678 и ПЛИС Xilinx Virtex‑7 (многоканальные демодуляторы, декодеры протоколов и т. п.), которые из-за своей сложности не могут быть реализованы внутри AMC-модулей радиомониторинга TORNADO-ARX1. Результаты многоканальной обработки с выхода AMC-модуля ЦОС/ПЛИС TORNADO-A6678 через порты Fat Pipe #0 и #1 его AMC-интерфейса поступают обратно в коммутатор потоков модуля MCH и, смешиваясь с выходными потоками обработанных данных с портов Fat Pipe #0 AMC-интерфейсов AMC-модулей радиомониторинга TORNADO-ARX1, поступают в соответствующие порты Fat Pipe #0 и #1 коммуникационного AMC-модуля T/AX-DSFPX-A, а затем через 10GbE порты SFP+ в оптико-волоконные линии до 10 км в центр обработки. Опять же, конфигурация потоков данных определяется загруженным ПО AMC-модулей TORNADO-ARX1 и TORNADO-A6678, а также конфигурацией центрального 10‑GbE коммутатора управляющего контроллера MCH. Все ПО и конфигурация коммутатора MCH загружаются дистанционно через IP-сеть.
Еще одно компактное супервысокопроизводительное устройство TORNADO-RxmMTCA удаленного многоканального радиомониторинга с мощной локальной ЦОС представлено на рис. 10.

Рис. 10. Компактное устройство удаленного многоканального радиомониторинга TORNADO-RxmMTCA на базе AMC-модуля TORNADO-ARX1, AMC-модуля ЦОС/ПЛИС TORNADO-A6678 и двухслотового мини-шасси MicroTCA:
а) внешний вид;
б) блок-схема
Это дистанционно управляемое устройство включает один AMC-модуль TORNADO-ARX1 многоканального радиомониторинга с опциональными внешними конвертерами 6, 12, 21 и 40 ГГц и супервысокопроизводительный AMC-модуль ЦОС/ПЛИС TORNADO-A6678. Устройство построено на базе двухслотового мини-шасси MicroTCA с пассивной кросс-панелью без коммутатора потоков.
Размеры и вес устройства аналогичны TORNADO-RxmMTCA (рис. 8). Однако по сравнению с ним данное устройство обладает мощной ЦОС, позволяющей ему осуществлять сложную обработку выходных ПЧ-потоков данных с AMC-модуля многоканального радиомониторинга TORNADO-ARX1 в реальном времени внутри AMC-модуля TORNADO-A6678 с использованием его суперпроизводительного 8‑ядерного процессора ЦОС TMS320C6678 и ПЛИС Xilinx Virtex‑7, включая функции многоканальной демодуляции и декодирования протоколов. В этом случае децимированные по времени выходные низкоскоростные потоки данных с модуля ЦОС/ПЛИС TORNADO-A6678 могут передаваться либо по IP-сети через порт 1GbE RJ45 управляющего контроллера eMCH, либо по оптоволоконному 10GbE соединению через порты SFP+, расположенные на передней панели модулей TORNADO-ARX1 и/или TORNADO-A6678. В последнем случае максимальная длина оптоволоконного соединения составляет 300 м, однако с помощью внешнего стандартного оптоволоконного ретранслятора длину соединения можно увеличить до 10 км.
Автономное устройство многоканального радиомониторинга на базе AMC-модуля TORNADO-ARX1
Уникальной особенностью AMC-модуля TORNADO-ARX1 является его способность работать в автономном режиме без каких-либо других AMC-модулей и компонентов систем MicroTCA, включая шасси MicroTCA.
Для этого достаточно установить AMC-модуль TORNADO-ARX1 в специальный компактный автономный корпус, который реально содержит только источник питания +12 В, и подключить AMC-модуль к локальной IP-сети через встроенный LAN-порт. В случае приема «необработанных» РЧ-данных реального времени необходимо также подключиться к 10GbE порту SFP+ на передней панели AMC-модуля, используя либо 10Gbps модуль SFP+ оптоволоконного трансивера на расстояние до 300 м, либо 10Gbps модуль SFP+ пассивного медного трансивера на расстояние до 5 м.
Как и в случае описанных ранее устройств, неограниченное число таких автономных суперкомпактных автономных устройств локального радиомониторинга может быть объединено в единую систему совместно с более сложными устройствами.
Программное обеспечение
Во всех рассмотренных устройствах радиомониторинга на базе AMC-модуля TORNADO-ARX1 используется одно и то же ПО AMC-модуля, а потребитель может перестраивать систему, комбинируя нужное число AMC-модулей TORNADO-ARX1 с другими необходимыми AMC-модулями и инфраструктурными компонентами систем MicroTCA в зависимости от решаемой задачи.
Объединенные в единую распределенную систему многоканального радиомониторинга, все устройства управляются дистанционно через IP-сеть с одного ПК, используя единое ПО, состав которого определяется конкретной задачей.
ПО всех концевых устройств распределенной системы многоканального мониторинга загружается либо автоматически из встроенной памяти, либо «апдейтируется» или подгружается дистанционно с управляющего ПК.
Заключение
Таким образом, можно строить многоканальные системы радиоконтроля, радиомониторинга и радиоразведки как набор распределенных в пространстве устройств, выполняющих свою работу автономно и соединенных высокоскоростными каналами связи на дальние расстояния. При этом каждое устройство состоит из стандартного набора аппаратных модулей в стандартных промышленных конструктивах, использующих стандартные ПО-модули. Система представляет собой единый комплекс, связи в котором стандартизированы, а их число неограниченно.
В заключение необходимо особо выделить несколько существенных достоинств модульных распределенных систем многоканального радиомониторинга на базе линейки аппаратуры TORNADO-RxMTCA. Это общее удаленное централизованное управление всей системой с одного ПК, децентрализованная параллельная обработка данных, работа и синхронизация всей системы в едином времени с высокой точностью, а также возможность длительной регистрации РЧ-сигналов с любого AMC-модуля TORNADO-ARX1 и, соответственно, возможность архивирования исходных радиосигналов с последующим постанализом записанных данных и созданием новых алгоритмов обработки.
 18 февраля, 2020
18 февраля, 2020 27 февраля, 2020
27 февраля, 2020 25 декабря, 2008
25 декабря, 2008