
Моделирование влияния помех от водной поверхности на антенны
Введение
В модели визуального наблюдения оценка и обнаружение объекта на фоне сильно зашумленной окружающей среды — это технически вычислительно сложная задача. Основная цель статьи — идентифицировать объект из мультимодели фона с использованием вычитания фона и вычитания влияния интерференции и определить методы удаления шума. Для этого нужно обнаружить и извлечь информацию, отраженную от объекта, из фонового изображения.
После обнаружения объекта может появиться большое количество возможных ухудшений качества принимаемой информации. Общий признак ухудшения приема — размытость, движение и шум. Размытие отражения может возникать, когда объект находится за пределами дальности обнаружения, что приводит к потере информации во время экспозиции.
Результаты исследований
Важное применение — полуактивное самонаведение ракет. Ракета имеет приемник и антенну. Ракетный приемник получает два приема для одной и той же радиолокационной передачи: один по пути «радар-ракета» и один по пути «радар-цель-ракета». Различия в задержке и доплеровском сдвиге между ними, угол к цели, а также скорость их изменения могут полностью или частично использоваться для задач самонаведения. Характеристики отражения цели в различных ситуациях различаются.
Мощность помех на входе приемника РЛС
Помехи от моря — функция fnPsea1, предназначена для расчета мощности мешающих отражений от взволнованной поверхности моря PM на входе приемника РЛС.
Синтаксис: y = fnPsea1(Pu,Gm,tv,ti,p%,zpm,kd,fi,Hm,Ha,R,b5,fb,eo,c1,c2).
Входные формальные параметры:
- Pu — импульсная мощность передающего устройства РЛС (Pи);
- Gm — максимальный КНД антенны РЛС (Gm);
- tv — длина волны РЛС (l);
- ti — длительность зондирующего импульса (tи);
- p% — признак поляризации облучающего морскую поверхность электромагнитного поля: p% = 1 — вертикальная поляризация; p% = –1 — горизонтальная поляризация;
- zpm — потери мощности помехи при обработке (h, дБ);
- kd — удельный (погонный) коэффициент затухания (d, дБ/км);
- fi — ракурс морской волны (f) — угол между направлением облучения и нормалью к фронту морской волны (f = 0 при облучении навстречу волне);
- Hm — средняя высота морской волны (hм);
- Ha — высота расположения антенны РЛС над уровнем моря (hа);
- R — наклонная дальность до цели (R);
- b5 — ширина ДНА по уровню половинной мощности в вертикальной плоскости (Db0,5);
- fb — уровень боковых лепестков ДНА (f б);
- eо — угол подъема оси ДНА над плоскостью горизонта (e0);
- c1 — характеристический угол e1 для косекансной ДНА; равен 0 для симметричной ДНА;
- c2 — ширина ДНА в вертикальной плоскости по уровню половинной мощности De0,5 для симметричной ДНА.
Ограничения: hа< R. Кроме того, для упрощения принято, что e3 = 2e2.
В программе использованы функции fnRcsm1, fnFg2#, fnFd2 и fnApt1.
Математическое описание задачи
В общем случае сигнал помехи от взволнованной поверхности моря складывается из сигнала, принятого по главному лепестку ДНА, и сигнала, принятого по боковым лепесткам ДНА.
Мощность отраженного от взволнованной поверхности моря сигнала, принимаемого по главному лепестку ДНА Pмг, составляет:

а мощность отраженного от взволнованной поверхности моря сигнала, принимаемого по боковым лепесткам ДНА Pмб, равна:

Vм — интерференционный множитель, равный:

C — скорость распространения радиоволн (3×108 м/с); kз — коэффициент затухания при распространении радиоволн в тропосфере (см. функцию fnFd2); s0 и sб0 — удельная ЭПР взволнованной морской поверхности при облучении ее главным и боковыми лепестками соответственно; f(eм) — значение нормированной ДНА под углом eм (см. функцию fnApt1); Dbм — ширина главного лепестка ДНА в горизонтальной плоскости на уровне угла облучения морской поверхности относительно оси ДНА, показано на рисунке, рассчитываемая в зависимости от типа ДНА по формулам:
для симметричной ДНА:

для косекансной ДНА:
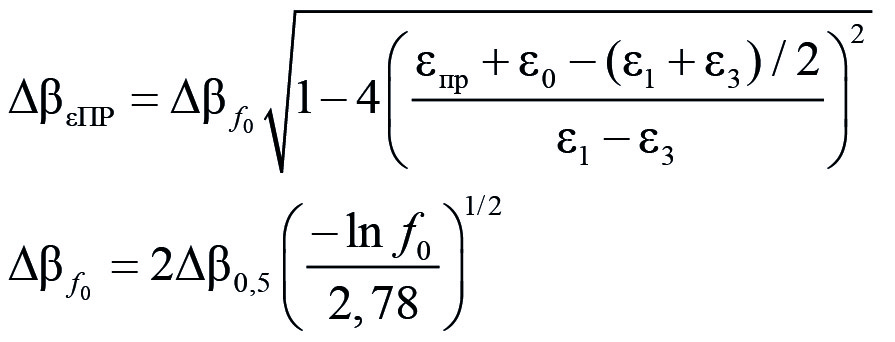
с заменой угла eпр на угол eм, который равен:
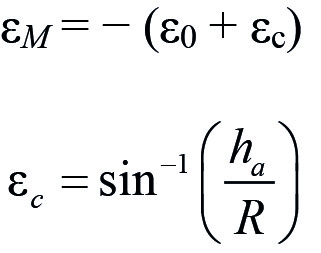
Общая мощность отраженного от взволнованной поверхности моря сигнала на входе приемника РЛС равна:
Pм = Pмг + Pмб,
если εм ≤ Δεfб / 2 (для симметричной ДНА) или –eс ≥ e3 (для косекансной ДНА). При этом:
l6 = R(2πcosεc − ∆βM)
Pм = Pмб,
если eм > Δefб / 2 (для симметричной ДНА) или –eс< eз (для косекансной ДНА). При этом l6 = 2pRcosec.

Рис. Геометрические соотношения при облучении моря
Листинг программы в MatLab:
function y = fnPsea1 (Pu,Gm,tv,ti,p,zpm,kd,fi,Hm,Ha,R,b5,fb,eo,c1,c2) d=2*sqrt(-log(fb)/2.78); a=4*Ha*Hm/tv; c3=c2+c2; if R<a v=6; else v=6*(a/R)^4; end a=Ha/R; e=tan(a/sqrt(1-a*a)); a=75589.534*Pu*Gm*Gm*tv*tv*10^(-.1*zpm)*ti*v*fnFd2(kd,R)/R^3; v=cos(e); em=-eo-e; %Для с1=0 if c1==0 g=c2*d; if abs(em)>g/2 v=2; a=a*fnRcsm1(-1,p,e,fi,Hm)*fb*fb*6.283185307; return end g=em/g; g=b5*d*sqrt(1-4*g*g); d=fnApt1(em,eo,c1,c2,fb); end %Для с1 не равного 0 if c1~=0 if -e<c3 v=2; a=a*fnRcsm1(-1,p,e,fi,Hm)*fb*fb*6.283185307; return end g=(em+eo-(c1+c3)/2)/(c1-c3); g=b5*d*sqrt(1-4*g*g); d=fnApt1(em,eo,c1,c2,c3); end if v>1 y=a; else y=a/v*(b5*.7516878*d*d*fnRcsm1(1,p,e,fi,Hm)*(2*fnFg22(1.6673332*g/b5)-1)+fb*fb*fnRcsm1(-1,p,e,fi,Hm)*(6.283185307*v-g)); end end
Результаты работы программы
В данном примере в качестве исходных заданы следующие величины:
- Pu = 100 000 — импульсная мощность передающего устройства РЛС;
- Gm = 1000 — максимальный КНД антенны РЛС;
- tv = 0,1 м — длина волны РЛС;
- Ti = 10-6 — длительность зондирующего импульса;
- p = 1 — признак поляризации облучающего морскую поверхность электромагнитного поля, в примере использована вертикальная поляризация;
- zpm = 5 — потери мощности помехи при обработке (дБ);
- kd = 0,2 — удельный (погонный) коэффициент затухания (дБ/км);
- fi = 1 — ракурс морской волны (f) — угол между направлением облучения и нормалью к фронту морской волны;
- Hm = 2 — средняя высота морской волны;
- Ha = 20 — высота расположения антенны РЛС над уровнем моря;
- R = 10 000 — наклонная дальность до цели;
- b5 = 0,1 — ширина ДНА по уровню половинной мощности в вертикальной плоскости;
- fb = 0,01 уровень боковых лепестков ДНА.
Вычисления проводились для общей мощности отраженного от взволнованной поверхности моря сигнала на входе приемника РЛС:
- При c1 = 0 рассматривали симметричную диаграмму направленности, c2 = 0,1, ширина ДНА в вертикальной плоскости по уровню половинной мощности De0,5 для симметричной ДНА, для разных значений угла подъема оси ДНА над плоскостью горизонта e0^
-
- ans = 5,2598e-17 при e0 = 0,01;
- ans = 4,3509e-17 при e0 = 0,011;
- ans = 4,0800e-17 при e0 = 0,012.
- При с1 = 1 характеристический угол e1 для косекансной ДНА, рассматривали косекансную ДНА, e0 = 0,2 угол подъема оси ДНА над плоскостью горизонта (e0); для разных значений характеристического угла e2 для косекансной ДНА:
-
- ans = 3,0024e-15 при с2 = –0,01;
- ans = 3,0981e-15 при c2 = –0,011;
- ans = 2,2504e-15 при c2 = –0,005.
Выводы
Для симметричной антенны с увеличением угла подъема оси диаграмма направленности антенны над плоскостью горизонта и общая мощность отраженного от взволнованной поверхности моря сигнала на входе приемника РЛС повышается.
Для косекансной антенны с уменьшением характеристического угла c2 отраженная от взволнованной поверхности мощность на приеме РЛС уменьшается.
- Шабалин В. Н. Математическое и программное обеспечение решения задач радиолокации на микроЭВМ «Электроника Д3-28». Л.: ВМА, 1991.
- Ширман Я. Д., Манжос В. Н. Теория и техника обработки радиолокационной информации на фоне помех. М.: Радио и связь, 1981.
- Журавлев А. К., Лукошкин А. П., Поддубный С. С. Обработка сигналов в адаптивных антенных решетках. Л., ЛГУ, 1983.
- Пудовкин Ю. Н., Панасюк Ю. Н., Чернышова Т. И. и др. Электромагнитная совместимость и помехозащищенность РЭС: учебное пособие. Тамбов, Изд-во ФГБОУ ВПО «ТГТУ», 2013.
 17 марта, 2010
17 марта, 2010 11 сентября, 2013
11 сентября, 2013 29 декабря, 2011
29 декабря, 2011