
Построение системы автомобильного мониторинга на базе ГЛОНАСС-приемника ML8090
Если говорить о массовой продукции, то в настоящее время точность определения координат объекта составляет порядка единиц метров, технически же можно увеличить ее до сантиметров. Системы спецприменения уже сейчас обеспечивают такую точность, например геодезические приемники, которые используют для установления координат на местности для определения границ земельных участков.
Как известно, на сегодня функционируют две спутниковые системы определения координат — отечественный ГЛОНАСС и американский GPS. Обе имеют полноценную спутниковую группировку и запасные спутники. На подходе:
- европейская система Galileo (на текущий момент четыре спутника, полное развертывание запланировано на 2018 г.);
- китайская система BeiDou2 (на текущий момент 15 спутников, полное развертывание к 2020 г.);
- японская система QZSS (на сегодня один спутник дифференциальной коррекции, до 2017 г. должно быть выведено на орбиту еще три спутника, а после 2018 г. — остальные). Эта система, скорее, является дополнением к GPS и имеет главной целью увеличить точность измерения координат (до сантиметров) на территории Японии.
Фирма PT Electronics (Navia) подготовила к выпуску модуль ML8090, построенный на новейшем навигационном чипсете семейства TESEO III (STA8090FG) от STMicroelectronics. Модуль способен одновременно следить за 48 спутниками любой из навигационных систем ГЛОНАСС/GPS/Galileo/BeiDou/QZSS. В семейство TESEO III, объединяющее все необходимое для построения систем определения положения, входят несколько модулей третьего поколения для разных условий работы, а также программное обеспечение (ПО) DRAW для расчета предсказания положения объекта. DRAW расшифровывается как Dead Reckoning Automotive Way и может быть переведено как «предсказание движения автомобиля».
Характеристики модуля ML8090
Точность определения координат модуля ML8090 в инженерных образцах на сегодня составляет 2 м по уровню 0,5 при использовании альфа-версии встроенного ПО. Это означает, что при статистической обработке большого количества отсчетов (5–10 тыс.) 50% точек попадают внутрь окружности диаметром 2 м. По мере доработки математического обеспечения точность вырастет минимум втрое и составит 1–0,6 м. Также в кристалле заложена возможность выполнять определение координат с использованием фазовых методов, что даст увеличение точности до 50 см. В кристалл интегрированы часы реального времени и цепи их поддержки от резервной батареи.
Максимальная частота выдачи координат составляет 10 Гц. Это программное ограничение, поскольку описываемое изделие предназначено для гражданского применения. Для инженеров-разработчиков предоставляется SDK для пользователя, а большие свободные ресурсы для приложения пользователя позволяют решать сложные задачи. Например, используя SDK, можно дописать собственную программу и в готовом приборе полностью исключить внешний процессор, всю логику работы готового изделия обеспечить внутренними, уже имеющимися ресурсами STA8090FG. SDK поставляется по запросу пользователя бесплатно, но потребуется подписать NDA.
Также следует отметить традиционно качественную защиту антенного входа от электростатики: до 8 кВ воздушного разряда гарантируется официально, фактически — до 15 кВ. 15 кВ — это пробивной промежуток порядка 4 мм в воздухе.
Основные характеристики устройства:
- чувствительность –162 дБм внутри помещения в режиме захвата;
- время захвата (TTFF) менее 1 с при горячем старте и 30 с при холодном;
- высокопроизводительное микропроцессорное ядро ARM946 (тактовая частота до 196 МГц);
- 256 кбайт статического ОЗУ;
- встроенная SQI flash-память объемом 16 Mбайт;
- 32-битный сторожевой таймер;
- три последовательных интерфейса;
- интерфейс I2C, способный работать в режиме Master и Slave и позволяющий подключить интегрированный датчик ускорения и твердотельный гироскоп для получения данных для расчетов траектории в режиме Dead Reckoning;
- синхронный последовательный интерфейс (SSP, поддерживается режим Motorola-SPI);
- USB 2.0 Full speed с интегрированным приемопередатчиком;
- два контроллера CAN-шины, позволяющие подключение для считывания текущих значений скорости/пробега автомобиля и т. д.;
- двухканальный АЦП;
- встроенный импульсный модуль управления питанием;
- корпус TFBGA99 (5×6×1,2 мм), шаг выводов 0,5 мм.
Условия эксплуатации устройства следующие:
- основной (Vinl) и резервный (Vinb) источники питания 1,6–4,3 В;
- питание цифровой части (Vdd) 1,2 В ±10%;
- питание высокочастотных узлов (Vcc) 1,2 В ±10%;
- питание цепей ввода/вывода (Vddio) 1,8 В ±5% или 3,3 В ±10%;
- диапазон рабочих температур –40…+85 °C.
Новый модуль ML8090 будет доступен в почти таком же корпусе, как и ML8088. Боковые выводы останутся теми же, дополнительные выводы появятся на нижней поверхности модуля (рис. 1). Поначалу цена нового устройства будет несколько выше, чем ML8088, но по мере освоения производства и наращивания выпуска предполагается достичь такой же стоимости изделия, как сейчас у ML8088.

Рис. 1. Примерное расположение выводов на нижней поверхности ML8090
Краевой вывод 15 (рис. 1) служит для подачи питания (1,8 или 3,3 В) интерфейсов группы R1 (краевые контакты). Питание нижних интерфейсов (3,3 В) заведено на вывод 30. Сигнал Standby (вывод 19) и сигнал WakeUp всегда работают с уровнем 1 В. Группа контактов JTAG предназначена для отладки ПО.
На момент написания статьи производитель еще не представил окончательную разводку выводов. Наиболее вероятно, что выводы внешнего (1–22) и первого внутреннего (23–44) рядов останутся неизменными, а назначение выводов «внутренней десятки» (45–54) может измениться.
Возможности чипсета STA8090FG
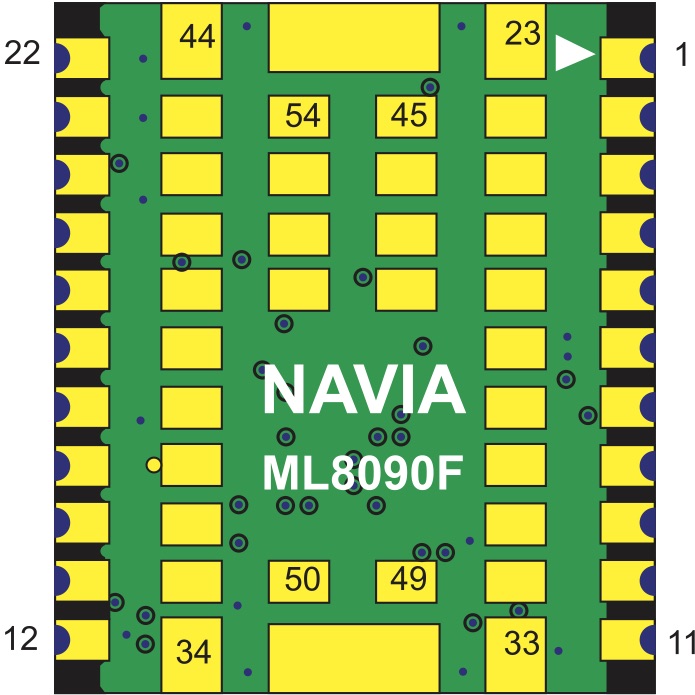
Рис. 2. Блок-схема STA8090FG
Способность STA8090FG использовать одновременно множество сигналов от всех систем GNSS, независимо от их принадлежности к разным системам, позволяет ему рассчитывать данные позиционирования с высочайшей точностью. Кристалл отлично работает в тяжелых условиях современных городов с высокоэтажной застройкой и в условиях, когда захват и слежение за спутниками сильно затруднены наличием строений и другими препятствиями. Требуется лишь минимальное количество вспомогательных элементов (обвязка) для получения полностью законченного изделия с весьма конкурентной ценой. Малое место, необходимое для размещения STA8090FG в готовом устройстве, делает этот кристалл подходящим для использования в портативных трекерах, разнообразных устройствах телематики, планшетах и смартфонах, морских и спортивных устройствах.
Блок-схема STA8090FG показана на рис. 2.
STA8090FG отличают продвинутые средства управления энергопотреблением. Основные интерфейсы UART и SPI работают с уровнем сигнала 1,8 или 3,3 В (по выбору пользователя), а питание модуля может быть в диапазоне 1,8–4,3 В. Это позволяет использовать совместно с модулем современные процессоры, непосредственно подключая модуль к шинам данных. Устройства сопряжения не требуются. Границы напряжения питания позволяют использовать литиевые аккумуляторы непосредственно без дополнительных стабилизаторов.
STA8090FG поставляется полностью укомплектованным матобеспечением, которое выполняет все расчеты по позиционированию, включая слежение, захват, навигацию и вывод данных. При этом никакая дополнительная память не требуется, т. е. в кристалле есть все, что нужно.
Сценарии использования режима предсказания для STA8090FG
В качестве примера возьмем обычный автомобиль. Система позиционирования на базе STA8090FG будет получать данные от систем спутниковой навигации от антенны, показания трехосевого твердотельного датчика ускорения (MEMS Accelerometer), трехосевого твердотельного гироскопа (MEMS Gyroscope) и данных о перемещении автомобиля, доступные по CAN-шине (рис. 3).

Рис. 3. Состав датчиков для системы предсказания положения
Пока автомобиль движется по местности без помех приему сигналов спутников (режим «чистого неба», рис. 4), STA8090FG использует данные для расчета положения и калибровки вспомогательных датчиков.

Рис. 4. Движение автомобиля в режиме «открытого неба»
Если автомобиль движется по городу с высокими зданиями, то прием сигналов спутников затруднен (рис. 5). В этом случае STA8090FG дополняет данные по положению от спутников данными от гироскопа, акселерометра и одометра. Для сведения данных от датчиков используется встроенное ПО DRAW.
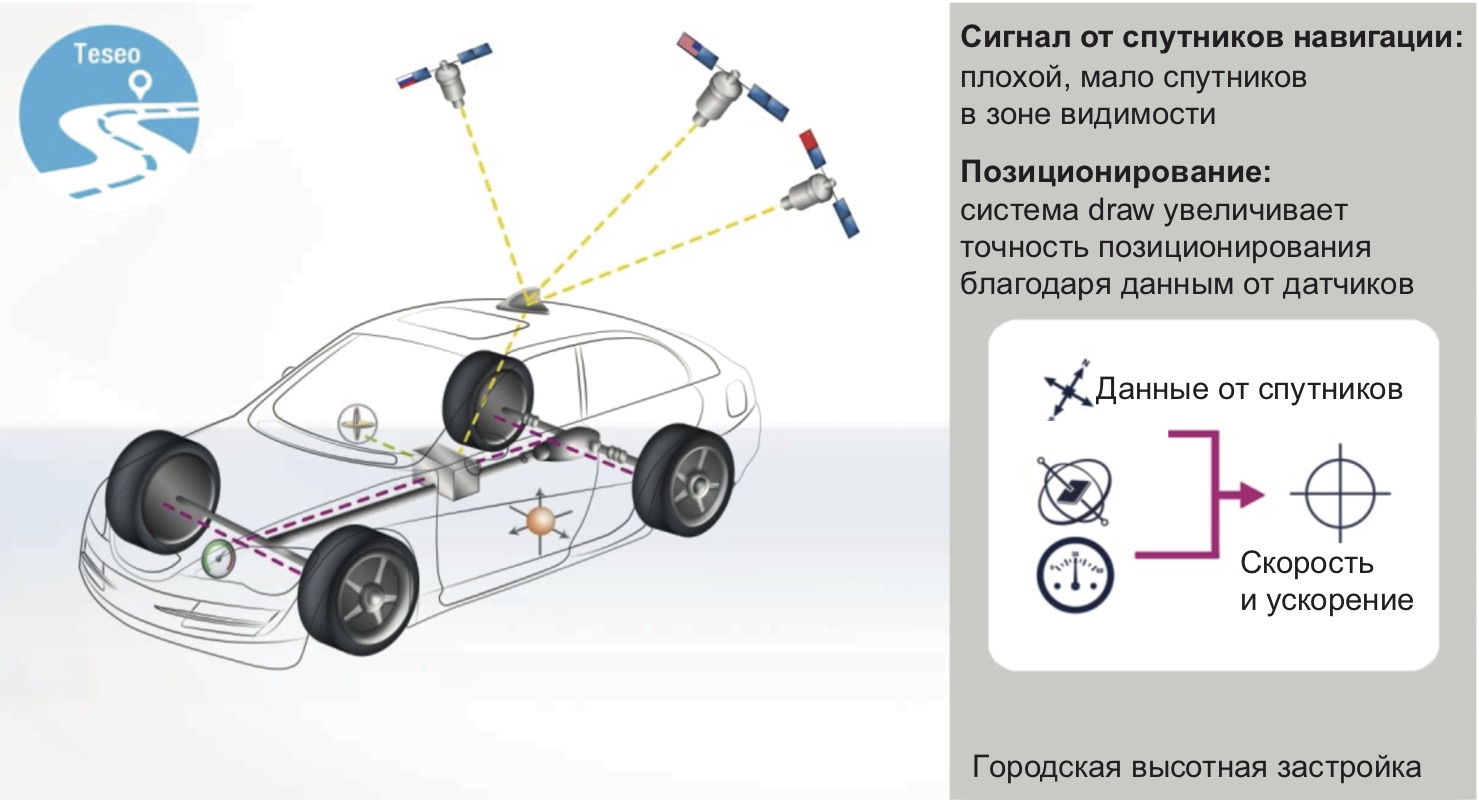
Рис. 5. Движение автомобиля в режиме застройки города высотными зданиями
Третий вариант — движение по многоуровневой развязке (рис. 6). В этом случае важно знать не только плоскостные координаты, но и высоту. Программа DRAW использует весь комплекс данных, включая данные от трехкоординатного твердотельного акселерометра, что позволяет значительно точнее определять положение автомобиля на развязке, а именно — на каком из лепестков развязки находится в данный момент автомобиль.

Рис. 6. Движение автомобиля на многоуровневой развязке
И наконец, самый сложный вариант — подземный многоуровневый паркинг или протяженный туннель (рис. 7). В этом случае сигналы спутников отсутствуют полностью, но система DRAW, используя информацию от трехосевых твердотельных акселерометра и гироскопа, а также от одометра, продолжает выдавать информацию о положении автомобиля с высокой точностью.

Рис. 7. Движение автомобиля на многоуровневом паркинге
Преимущества многосистемного навигационного приемника
Поскольку на текущий момент развернуты всего две полноценные спутниковые навигационные системы (ГЛОНАСС и GPS), рассмотрим преимущества совместного их использования. К ним относятся:
- минимизация времени первоначального определения местоположения;
- минимизация дисперсии расчета координат;
- возможность отбора наилучших измерений;
- фильтрация случайных отклонений;
- сохранение полной работоспособности в случае отказа одной из систем.
На рис. 8 показано сравнение возможностей двух систем одновременно и только одной системы. Использование двух систем одновременно значительно улучшает работу системы GNSS. Так, например, вдвое уменьшается разброс координат и вдвое увеличивается точность их определения.

Рис. 8. Сравнение возможностей одной и более одной системы GNSS
При использовании ПО предсказания очень важно обеспечить максимальное количество и точность дополнительных данных, включая температуру, поскольку показания твердотельных акселерометров и гироскопов достаточно сильно зависят от температуры. Если обеспечить ПО DRAW данными в том числе и от температурных датчиков, то после выполнения калибровки точность расчетов положения значительно увеличится.
Увеличение точности при работе ПО предсказания движения DRAW можно проиллюстрировать такими данными: при движении в течение 10 мин в туннеле Namsan (Сеул) пройден путь в 1500 м. Температура в туннеле изменилась на 5 °С. Ошибка составила 40 м (2% от пройденного пути) с учетом ухода данных твердотельного акселерометра и гироскопа, а без такой температурной коррекции — 430 м (28% от пройденного пути).
Заключение
В статье рассмотрен новый модуль ML8090, производящийся на базе последнего, самого современного однокристального устройства STA8090FG.
Ключевые особенности ML8090:
- пять систем навигации – GPS/Galileo/GLONASS/BeiDou/QZSS;
- ARM946 MCU;
- повышенная точность определения координат (потенциально до 50 см);
- два интерфейса UART, один USB/UART, один I2C, один SPI, один MMC, CAN;
- выбираемое пользователем напряжение работы интерфейсов (1,8 или 3,3 В);
- ПО DRAW для предсказания положения (Dead Reckoning Automotive Way);
- широкий выбор внешних датчиков, настройка внешних датчиков в уставках программы;
- автокалибровка датчиков в процессе работы, компенсация температурных дрейфов, автоподстройка показаний датчиков гироскопа ускорения под реальное положение после монтажа (не требуется ни точной установки, ни калибровки);
- SDK для собственных приложений клиента. ПО DRAW поставляется по запросу.
 27 марта, 2020
27 марта, 2020 22 ноября, 2021
22 ноября, 2021 24 мая, 2014
24 мая, 2014