
ГЛОНАСС-приемник ML8088sЕ — новые возможности
Введение
Рис. 1. Внешний вид приемника ML8088sE
На российском рынке бренд НАВИА относительно новый, но, несмотря на это, технические решения НАВИА успели завоевать доверие многих разработчиков электронного навигационного оборудования. Например, ГЛОНАСС-приемники GL8088 имеются в приборной панели «ЛАДА Калина» и «ЛАДА Приора». Приемник ML8088sE установлен не только в приборной панели «ЛАДА Гранта», но и в таких устройствах, как тахографы, автомобильные системы мониторинга и системы синхронизации времени. Что же представляет собой ГЛОНАСС-приемник ML8088sE — самый популярный и маленький приемник российского производства (рис. 1)? В рамках статьи рассмотрим более подробно, на каком чипсете построены приемники, каковы особенности включения, а также разберем более подробно, как работает режим ST-AGPS.
ML8088sE
ГЛОНАСС-преемники ML8088sE подверглись кардинальным изменениям по сравнению с приемниками производства 2011–2012 годов. Так, вместо чипсета STA8088FG применяется обновленный чипсет STA8088CFG, на котором и построены все приемники производства 2013 года. В обновленном приемнике также успешно решен вопрос со статикой, ESD-защита соответствует 3-му уровню по IEC 61000-4-2 — 8 кВ. Благодаря обновленному чипсету улучшились и технические характеристики. Основные технические параметры представлены в таблице 1.
|
Параметр |
Характеристика |
|
Частотный диапазон, МГц |
1575–1602 |
|
Поддерживаемые системы |
GPS/ГЛОНАСС/Galileo |
|
Чувствительность, дБм |
–161 |
|
Энергопотребление |
55 мА/35 мА (с включенным режимом низкого энергопотребления), порядка 10 мА в периодичном режиме |
|
Точность |
На 1,5 м без диф. режима и 1,2 м с диф. режимом |
|
Напряжение питания, В |
3,3 |
|
Функции |
ST-AGPS, 1PPS, Sleep Mode, Adaptive Low Power mode |
|
Габариты, мм |
15×13,5×2,8 |
|
Температурный диапазон, °С |
–50…+90 |
Появилось новое программное обеспечение модулей и функции, новые команды и возможности. В последних версиях ПО добавлены режимы адаптивного энергопотребления, спящий режим, режим работы с дифференциальными поправками. При активации функции ST-AGPS время теплого старта приравнивается ко времени горячего старта, осуществляется уверенный прием сигналов со спутников, даже в осложненных условиях. Итак, каковы же характеристики нового чипсета?
Чипсет STA8088CFG
Приемники НАВИА разрабатывались на чипсете от STM. В первых версиях ML8088s применялся навигационный чипсет STA8088FG. Его особенность заключается в том, что он содержит большое количество интерфейсов и способен принимать сигналы от различных спутниковых группировок: GPS, ГЛОНАСС, Galileo. По сути, получился микроконтроллер с навигацией. Структура чипсета приведена на рис. 2.

Рис. 2. Структура чипсета
Чипсет построен на ядре ARM 946, содержит встроенную двухуровневую систему подавления помех, 2 Мбайт встроенной флэш-памяти предназначены для записи и хранения данных о спутниковой обстановке. Ресурс флэш-памяти рассчитан на 10 лет работы. Доступны следующие интерфейсы: до 3 UART, в приемнике предусмотрены 2 UART для подключения и отладки, до 12 GPIO, USB 2.0, SPI, АЦП и JTAG, предназначенный для отладки чипсета.
Схема включения приемника НАВИА ML8088sE
На основе приемника НАВИА ML8088sE разработчик может создать техническое решение для приема спутниковых сигналов, затратив минимум усилий на создание и подсоединение приемника (рис. 3). Для активирования подключения приемника не обязательно задействовать все линии. Исходя из своей задачи, можно использовать только те выводы, которые необходимы для решения конкретных задач.

Рис. 3. Схема включения микроконтроллера с ML8088sE
В большинстве реальных применений задействованы не все линии связи. Рассмотрим более подробно основные линии приемника:
- Вывод4 TX1 — UART1 Tx NMEA Out.
Сигнальная линия предназначена для передачи в конечное изделие информации в виде сообщений NMEA и собственных служебных сообщений приемника, имеющих NMEA-подобный формат. Линия является основным выходом приемника.
- Вывод 18 /RST — /RESET In.
Сигнальная линия, предназначенная для осуществления аппаратного сброса приемника. Этот сигнал в некоторых случаях можно не подключать, однако при программных или аппаратных конфликтах между приемником и конечным устройством подача данного сигнала позволяет устранить последствия большинства конфликтов.
- Вывод5 RX1 — UART1 Rx NMEA In.
Сигнальная линия, предназначенная для подачи на приемник команд и ввода данных. При помощи команд можно осуществлять управление приемником, изменять его программную конфигурацию, а также производить смену встроенного программного обеспечения приемника.
- Вывод2 TX1 — UART0 Tx Debug Out.
Сигнальная линия, предназначенная для передачи приемником отладочной информации, которая передается в текстовом виде, однако ее структура не раскрывается разработчиком. Данная линия может применяться для смены встроенного программного обеспечения приемника (совместно выводы 1 и 2).
- Вывод1 RX1 — UART0 Rx RTCM In.
Сигнальная линия, предназначенная для подачи на приемник сообщений RTCM SC-104 (данных для дифференциальной коррекции принимаемых сигналов). Может применяться для смены встроенного программного обеспечения приемника (совместно выводы 1 и 2).
- Вывод 3 PPS — 1PPS Out.
Сигнальная линия, предназначенная для передачи в конечное устройство сигнала метки времени PPS. Предназначена для взаимной синхронизации нескольких устройств, находящихся в различных пространственных точках.
- Вывод8 GNSS Status — GNSS Status Out.
Сигнальная линия, предназначенная для передачи в конечное устройство информации о статусе решения навигационной задачи. Данный сигнал является опциональным и формируется не всеми вариантами встроенного программного обеспечения приемника. В состоянии заводской поставки сигнал GNSS Status не формируется, для получения приемников со встроенным ПО, создающим этот сигнал, следует сделать особое указание при заказе приемников у поставщика.
Обновление встроенного программного обеспечения приемника может быть произведено непосредственно заказчиком, как при помощи сервисной платы, так и в конечном изделии (самостоятельное обновление встроенного ПО приемника требует двусторонней связи приемника с внешним компьютером, действующим под управлением Windows).
Напряжения питания приемника
Для работы приемника применяются два напряжения питания: +3,3V_main и +Vbat_RTC.
- Вывод12 V_RTC — +Vbat RTC.
Питание встроенных часов реального времени приемника. Пределы изменения 2–3,6 В, ток потребления 50 мкА. При напряжении +Vbat_RTC, превышающем +3,3V_main, ток потребления в данной цепи может возрастать до 2 мА.
- Вывод13 V_IN — +3,3V_main.
Основное напряжение питания приемника. Пределы изменения 3–3,6 В. Ток потребления может достигать 120 мА, без включения тока потребления активной антенны, подсоединенной к приемнику.
Минимальная схема включения
Минимальная схема включения приемника приведена на рис. 4. В этой схеме задействованы один выходной сигнал UART1 Tx NMEA Out, один входной сигнал /Reset и одно напряжение питания +3,3V_main. Данная схема применяется при минимальных требованиях потребителя — получение только NMEA-потока информации без возможности управления приемником.

Рис. 4. Минимальная схема включения приемника ML8088sE
Особенности включения приемника
Включение приемника имеет некоторые особенности, и несоблюдение определенных несложных требований может привести к нестабильности работы или даже полной его неработоспособности.
Основные особенности могут быть разделены на несколько групп:
- диапазон питающих напряжений;
- допустимые напряжения на выводах;
- «фантомное питание»;
- батарейное питание RTC;
- включение питания;
- состояния выводов при включении (старте) приемника;
- программная конфигурация приемника;
- цепь питания активной антенны;
- согласование уровней информационных, статусных и управляющих сигналов.
Рассмотрим вышеуказанные особенности по порядку.
Диапазон питающих напряжений
Напряжение питания приемника не должно превышать 3,6 В. Иначе это может вывести приемник из строя. Основной причиной подобных превышений являются переходные процессы в источнике питания приемника при резком изменении нагрузки, например при включении питания, при переходе приемника из режима поиска (потребление до 120 мА) в режим сна (потребление менее 1,5 мА), при выходе приемника из режима сна и т. д.
Нижняя граница питающего напряжения составляет 3,0 В. Данное значение не является критичным, однако провалы ниже этого уровня могут приводить к перезапуску программного обеспечения приемника. Повреждения приемника при уменьшении питающего напряжения не происходит.
Допустимые напряжения на выводах
Напряжение на любых выводах приемника не должно превышать 3,6 В, чтобы приемник оставался работоспособным. Основными причинами подобных превышений являются переходные процессы в цепях связи «приемник — конечное устройство», а также переходные процессы в цепях питания конечного устройства.
«Фантомное питание»
Ни на одном выводе приемника (кроме вывода 12 V_RTC и вывода 18 — /RST) напряжение не должно превышать 0,3 В при отсутствии основного напряжения питания +3,3V_main. Иначе говоря, информационные линии связи «конечное устройство — приемник» ни в какой момент времени не должны быть источниками питания приемника.
Батарейное питание RTC
Напряжение питания встроенных часов реального времени должно находиться в диапазоне 2–3,6 В. Превышение уровня 3,6 В может привести к выходу приемника из строя, понижение уровня менее 2 В может привести к сбоям в работе часов и сбросу регистра конфигурации запуска приемника. Кратковременные (доли и единицы миллисекунд) провалы напряжения питания встроенных часов обычно не приводят к нарушениям в работе.
Не рекомендуется устанавливать величину напряжения питания часов реального времени выше напряжения основного питания приемника, так как в этом случае ток потребления по цепи часов может существенно возрастать и достигать 2 мА.
Приемники НАВИА ML8088sE обладают возможностью функционировать без применения напряжения питания встроенных часов реального времени. Естественно, при этом в случае отключения электропитания часы прекращают работу, однако особенности схемотехники и программного обеспечения приемника позволяют ему осуществлять быстрый старт и определение координат и в такой ситуации. По этой причине во многих схемах включения питание V_RTC на приемник можно не подавать.
Включение питания
При включении питания требуется обеспечить правильное выполнение процедуры старта приемника. Возможны несколько вариантов подсоединения источников питания к приемнику:
- основное питание и постоянно подключенная батарея питания часов реального времени;
- основное питание и перезаряжаемый источник питания часов (ионистор или аккумулятор);
- основное питание, подключенное и к Выводу 13 V_IN, и к Выводу 12 V_RTC, то есть основное питание и питание часов приемника осуществляются от одной цепи;
- основное питание, подключенное к Выводу 13 V_IN, Вывод 12 V_RTC не подключен.
ST-AGPS
Обычно под термином AGPS понимают несколько различных функций:
- Assisted GPS off-line.
Загрузка данных о спутниковой обстановке с удаленного источника. Наиболее старое, традиционное толкование термина. Загружаются альманах и эфемериды, иногда текущее время. Местоположение заранее неизвестно. Модуль GPS/ГЛОНАСС делает сам все вычисления. Требуется дополнительный канал связи, например GPRS.
- Assisted GPS on-line.
Загрузка данных о спутниковой обстановке с удаленного источника. Загружаются альманах и эфемериды, иногда текущее время. Местоположение заранее неизвестно. Модуль GPS/ГЛОНАСС выполняет измерения и передает все данные для проведения вычислений на центральный сервер. Требуется дополнительный канал связи.
- Advanced GPS.
Загрузка данных о спутниковой обстановке с удаленного источника, принятие информации о примерном местоположении приемника по данным сотового оператора (по информации о базовой станции, при возможности — о нескольких базовых станциях). Загружаются альманах и эфемериды, примерное местоположение и иногда текущее время. В данном случае навигационный приемник применяется для уточнения местоположения. Требуется дополнительный канал связи.
- AGPS predicted.
Прогнозирование спутниковой обстановки для формирования набора альманаха и эфемерид в приемнике до начала процедуры старта. Применяется с целью уменьшения времени холодного и теплого старта, а также для получения возможности старта в условиях слабого сигнала, когда холодный старт невозможен. Существуют две разновидности:
- On-line или Server based — данные вычисляются при помощи специального сервера и передаются на модуль по дополнительным каналам связи;
- Off-line, Autonomous или Self predicted — данные вычисляются приемником самостоятельно на основе принятой со спутников информации. Дополнительных каналов связи не нужно.
Как следует из вышеизложенного, в первых четырех вариантах модулю с системой AGPS для получения преимуществ над традиционным GPS/ГЛОНАСС-модулем необходим дополнительный канал связи, например GPRS или радиоканал. Только вариант с автономным прогнозированием спутниковой обстановки не требует дополнительного канала связи и, следовательно, пригоден к применению в большем объеме.
Далее будут рассмотрены некоторые аспекты использования системы ST-AGPS разработки фирмы STMicroelectronics.
Функции системы ST-AGPS
Система ST-AGPS включает как набор функций Assisted GPS off-line, так и полный набор AGPS predicted, что предоставляет конечному пользователю значительный выигрыш в функциональных возможностях изготавливаемого прибора. В состав ST-AGPS включены следующие функции:
- загрузка данных о спутниковой обстановке;
- Server Based-прогнозирование;
- Self Predicted-прогнозирование.
Следует учесть, что все функции предназначены для уменьшения продолжительности (времени) теплого старта модуля, то есть стирания предварительно сохраненной информации о спутниковой обстановке не производится. Продолжительность холодного старта, при котором осуществляется стирание имеющейся информации о спутниковой обстановке, не изменяется по сравнению с модулем, не использующим систему ST-AGPS.
Загрузка данных о спутниковой обстановке предусматривает несколько этапов, из которых только два последних выполняются непосредственно в модуле, расположенном на подвижном объекте.
- Подготовка данных о спутниковой обстановке модулем, установленным стационарно.
- Получение со стационарного модуля данных об альманахе, эфемеридах и текущем времени.
- Передача по каналу связи данных на устройство, в котором установлен подвижный модуль.
- Загрузка в подвижный модуль данных об альманахе, эфемеридах, текущем времени и ориентировочных координатах.
- Вычисление подвижным модулем текущих координат по сигналам спутников.
При этом подвижный модуль способен определить координаты (решить навигационную задачу) очень быстро (время решения сопоставимо со временем горячего старта) и, что очень важно, способен выполнить это даже в условиях слабого сигнала, при котором холодный старт уже невозможен.
Режим прогнозирования Self Predicted позволяет существенно снизить время теплого старта при длительных перерывах между включениями при автономной работе модуля. Глубина прогноза — 5 дней.
После включения модуль сначала определяет местоположение, затем в течение определенного времени (примерно 12–15 минут) накапливает данные и вычисляет прогноз спутниковой обстановки. После завершения расчетов спрогнозированные данные заносятся в энергонезависимую память модуля и становятся доступны встроенному ПО модуля для проведения последующих расчетов местоположения. После этого питание модуля можно отключать. Наличие батарейного питания часов реального времени модуля необязательно.
При следующем включении или после пропадания навигационного решения на достаточно длительное время модуль осуществляет старт с использованием спрогнозированных данных о местоположении спутников. При этом не требуется тратить время на ожидание приема всего набора информации об альманахах и эфемеридах. Старт занимает несколько секунд и может осуществляться в условиях достаточно слабого сигнала.
Данный режим имеет два варианта применения — по одному набору эфемерид и по двум наборам эфемерид. Эти варианты отличаются только доступностью для модуля только одного набора эфемерид (одно включение для накопления данных для прогноза) или двух наборов (два включения с достаточно большим временным интервалом между ними). Никаких дополнительных действий со стороны потребителя для выбора варианта работы не требуется, следует только включить модуль на достаточное для вычисления прогноза время один раз в пять дней (получится прогноз по одному набору эфемерид) или включать ежедневно (будет вычисляться прогноз по двум наборам эфемерид).

Рис. 5. Ошибка первого определения места при теплом старте с использованием данных автономного прогнозирования по одному набору эфемерид. Абсолютная величина
Однократное накопление данных и расчет прогноза спутниковой обстановки производится в условиях, когда второй цикл накопления недоступен по тем или иным причинам, например, приемник включается на достаточное время лишь один раз в пять суток.

Рис. 6. Ошибка первого определения места при теплом старте с использованием данных автономного прогнозирования по одному набору эфемерид. Распределение по плоскости
Накопленная вероятность ошибки первого местоопределения в режиме Self Predicted по одному набору эфемерид приведены в таблице 2.
|
Период |
Ошибка, м |
||
|
CDF 50% |
CDF 68% |
CDF 90% |
|
|
День 1 |
5,1 |
7,4 |
14,4 |
|
День 2 |
9,7 |
13,9 |
25,1 |
|
День 3 |
16,5 |
23,1 |
40,8 |
|
День 4 |
27,0 |
35,3 |
60,4 |
|
День 5 |
37,9 |
48,3 |
73,7 |
Как видно из приведенных данных в таблице 2, ошибка при первом определении координат увеличивается с устареванием набора в 5–7 раз. Время старта и точность первого определения местоположения хуже, чем для режима Server Based.
Наивысшая точность получается при работе с данными, подготовленными специализированным сервером.

Рис. 7. Ошибка первого определения места при теплом старте с использованием данных автономного прогнозирования по одному набору эфемерид. Накопленная вероятность
В случае работы в режиме Self Predicted точность первого определения координат при работе по двум наборам эфемерид выше в полтора-два раза, особенно со второго по четвертый дни. Время подготовки первого набора эфемерид — около получаса, второго и последующих — около 20 минут.
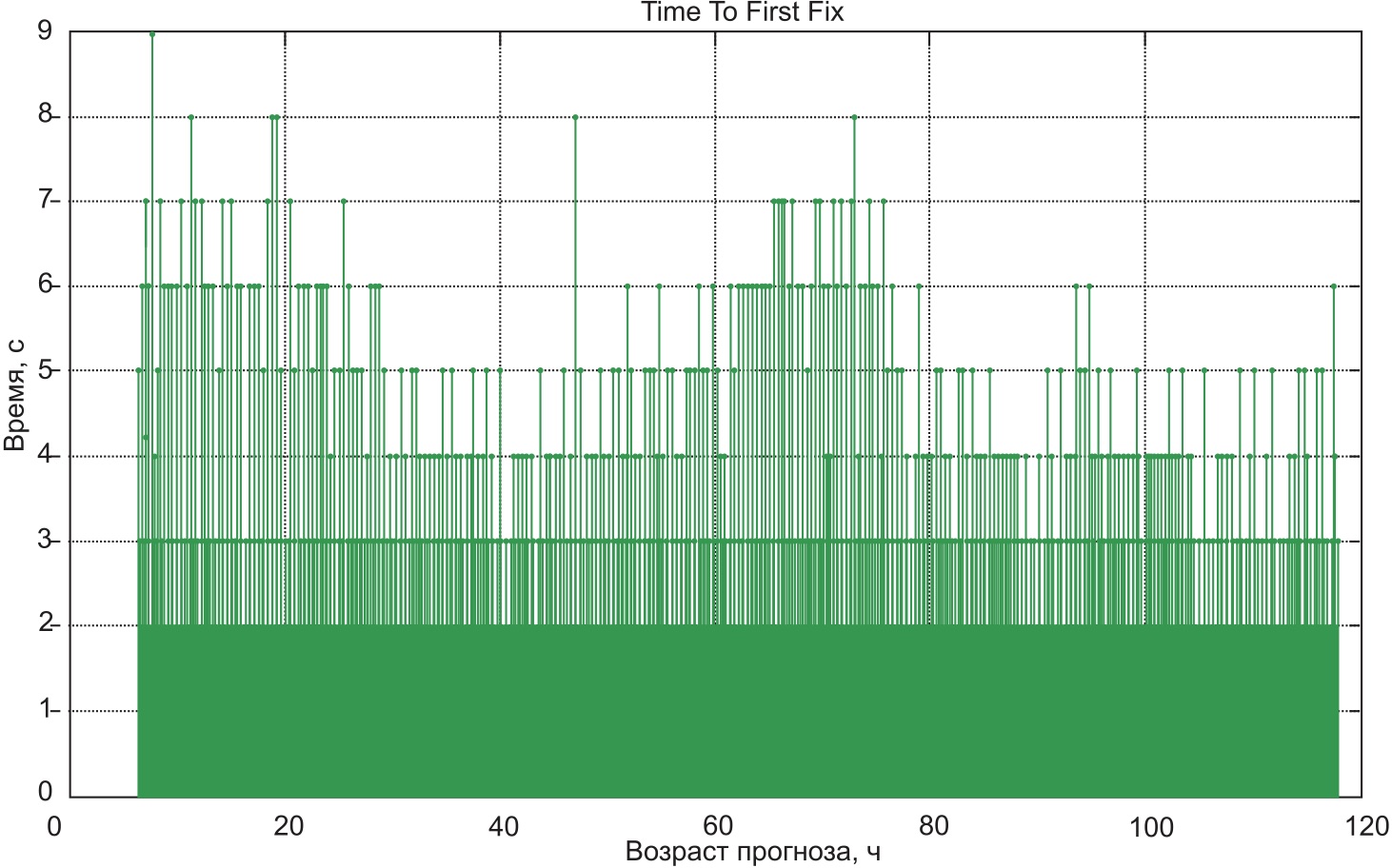
Рис. 8. Время первого определения местоположения при теплом старте с использованием данных автономного прогнозирования по одному набору эфемерид
Заключение
С каждым годом растут пожелания пользователей к ГЛОНАСС-приемникам. Приемники становятся компактнее, цена ниже, характеристики выше. На сегодня НАВИА отвечает всем современным требованиям: компактный размер, современное ПО, энергопотребление, высокие технические характеристики. Немаловажную роль играет функция ST-AGPS, благодаря которой осуществляется прием спутниковых сигналов в местах с плохой видимостью неба и приравнивается время теплого старта ко времени горячего старта.
 11 декабря, 2008
11 декабря, 2008 23 сентября, 2013
23 сентября, 2013 9 июля, 2020
9 июля, 2020