
Совмещенный приемник GPS/ГЛОНАСС для массового рынка
Потенциально совмещенный двухсистемный приемник обладает преимуществами, проистекающими из большего числа сигналов двух СРНС, что обеспечивает повышенную вероятность местоопределений при затрудненных условиях приема сигналов, например, в условиях плотной городской застройки или в помещениях. Существует различный взгляд на потенциал качественного улучшения местоопределений двухсистемной аппаратурой потребителя СРНС, например приемником GPS/ГЛОНАСС. Специалисты сходятся в том, что увеличенное число принимаемых сигналов космических аппаратов (КА) СРНС повышает вероятность успешных местоопределений (доступность СРНС-навигации). Так, в [1], основываясь на расчетах геометрического фактора HDOP (Horizontal Dilution of Position), делается вывод, что в ряде случаев добавление КА других (помимо GPS) систем может существенно улучшать качество навигации.
Другие исследователи [2] применительно к условиям плотной городской застройки говорят о примерно 10%-ном улучшении в двухсистемном приемнике доступности местоопределений и их избыточности, желательной для повышения надежности навигации, но в то же время отмечают отсутствие существенного повышения точности местоопределений. Объяснением такому наблюдению может служить тот факт, что дополнительные КА второй системы (ГЛОНАСС), так же как и КА GPS, сигналы которых принимаются в условиях резкого ограничения прямой видимости высотной застройкой, все находятся в узком телесном угле и, таким образом, не наблюдается существенного улучшения геометрических факторов местоопределения.
Проводя моделирование условий приема сигналов СРНС в Гонконге, авторы [3] делают вывод о недостаточности для качественной навигации в этих условиях приема сигналов даже трех СРНС, включая и будущую «Галилео». Правда, следует отметить, что принятое в моделировании условие приема только прямых сигналов, исключая переотраженные, является, возможно, излишне жестким.
Заключить обзор можно, сославшись, например, на [4], где отмечено, что в благоприятных условиях приема сигналов односистемный приемник GPS и так обеспечивает достаточно качественную навигацию, а в сложных условиях приема и добавление второй системы (ГЛОНАСС) не решает всех проблем. Окончательный ответ сможет дать только опыт достаточно широкой эксплуатации двухсистемных приемников СРНС.
Проектирование и особенности приемника
Главными требованиями к навигационному приемнику для массового рынка, а следовательно, и к совмещенным GPS/ГЛОНАСС-приемникам, являются высокая чувствительность, короткое время до первого местоопределения, малые габариты и энергопотребление, удобство интегрирования в пользовательскую аппаратуру, невысокая стоимость. В то же время эти требования должны удовлетворяться при достаточной точности местоопределений, в том числе в затрудненных условиях приема сигналов.
В ходе проектирования фирмой MStar Semiconductor совмещенного приемника СРНС GPS/ГЛОНАСС главным исходным положением было обязательное наличие в нем GPS-ядра, отвечающего самым высоким требованиям к навигационным приемникам для массового рынка. Добавление функциональности ГЛОНАСС рассматривалось как средство некоторого (не доказанного) повышения точности и надежности навигационных определений. Поэтому в условиях неразвитого рынка совмещенных приемников, а следовательно, и неопределенности перспектив массового производства потребительской GPS/ГЛОНАСС-аппаратуры, при определении архитектуры приемника было решено отказаться от полной стоимостной оптимизации в пользу уменьшения затрат на разработку.
Было принято следующее основное архитектурное решение. Разрабатывались два самостоятельных кристалла: радиочастотный преобразователь (РЧП) и кристалл цифрового навигационного процессора (ЦНП). При этом радиочастотный преобразователь — универсальный, оперативно настраиваемый на прием сигналов GPS L1 C/A или ГЛОНАСС L1. Блок-схема РЧП приведена на рис. 1.

Рис. 1. Блок-схема радиочастотного преобразователя
Радиочастотный преобразователь выполнен по распространенной схеме с одним преобразованием частоты и низким значением выходной промежуточной частоты (ПЧ) — около 4 МГц в режиме GPS и около 6 МГц в режиме ГЛОНАСС. Выходная ПЧ квантуется на четыре уровня в аналого-цифровом преобразователе (АЦП) — выходы Sign и Mag. Усилитель с переменным коэффициентом усиления управляется системой автоматической регулировки усиления (АРУ), использующей статистику выхода магнитуды квантованного выходного сигнала ПЧ. Синтезатор на базе устройства фазовой автоподстройки (ФАП) с управляемым делителем с дробным коэффициентом деления формирует гетеродинную частоту и частоту дискретизации отсчетов из частоты внешнего термокомпенсированного кварцевого опорного генератора TCXO. Блоки РЧП — прежде всего, синтезатор и комплексный фильтр — являются перестраиваемыми и обеспечивают выбор режима приема сигналов GPS или ГЛОНАСС. Блок SPI-команд обеспечивает управление настройкой элементов РЧП цифровым навигационным процессором. Встроенные линейные регуляторы напряжений обеспечивают блоки РЧП необходимыми номиналами напряжений при использовании единого внешнего питающего напряжения 1,8/3,3 В. В составе РЧП имеется малошумящий усилитель (МШУ), подключаемый внешними соединениями, который позволяет использовать пассивную антенну без внешнего МШУ.
Кристаллы универсального радиочастотного преобразователя были изготовлены по технологическим нормам 0,11 мкм. При самостоятельном использовании кристалл размещался в корпусе QFN-32 размерами 5×5 мм. Возможно также, например, использование корпуса FBGA-35 размерами 4×3 мм.
Цифровой навигационный процессор — единый, одновременно обеспечивающий обработку сигналов как СРНС GPS, так и ГЛОНАСС. На рис. 2 приведена блок-схема кристалла ЦНП.

Рис. 2. Блок-схема цифрового навигационного процессора
Основным в составе ЦНП является блок коррелятора, содержащий специализированные цифровые устройства обработки сигналов (СЦУОС) и встроенные вычислитель и оперативную память. СЦУОС совместно с вычислителем обеспечивают поиск и обнаружение оцифрованных в РЧП сигналов обеих СРНС, слежение за сигналами, выделение из них служебной информации и измерение параметров отслеживаемых сигналов. Блок коррелятора позволяет подключать устройства внешней памяти (Flash, SDRAM). Предусмотрен интерфейс сигналов времени, включающий в себя как выдачу метки времени, например с частотой 1 Гц, так и прием сигналов внешних событий.
Блок интерфейса данных обеспечивает информационное взаимодействие ЦНП с широким спектром внешних устройств. Для связи с внешним прикладным или хост-процессором служат интерфейсы PIF/SPI, UART и I2C. Инттерфейс PIF — это параллельный 4-битный SPI-подобный проприетарный интерфейс фирмы MStar Semiconductor. Протоколы обмена — NMEA-0183 и бинарный. Для соединения со стандартными пользовательскими устройствами служит интерфейс USB1.1. Предусмотрен интерфейс для подключения дисплея пользовательских устройств, например навигатора (PND). Три вида интерфейса предназначены для подключения внешних датчиков — I2C (мастер) и преобразователь широтно-импульсной модуляции (ШИМ) для датчиков движения, а также АЦП (два канала), например для датчиков температуры. Интерфейс SPI (мастер) предназначается для управления режимами работы РЧП. Предусмотрены также 14 программируемых линий ввода/вывода общего назначения (GPIO).
Блок питания содержит линейные преобразователи напряжения и обеспечивает остальные блоки необходимыми номиналами. Во многих применениях возможно электропитание кристалла ЦНП от единственного источника с напряжением 1,8 или 2,8 В.
Блок управления мощностью обладает возможностями гибкой избирательной подачи питания только на активно функционирующие блоки и устройства, обеспечивая тем самым режимы эффективной экономии энергопотребления. В частности, предусмотрено питание от отдельной маломощной батареи схемы хранения реального времени (RTC), что позволяет продолжительно отключать устройства приемника — как РЧП и ЦНП, так и внешнего опорного генератора TCXO.
Производительность вычислителя ЦНП в состоянии обеспечивать выполнение всего круга задач сигнальной обработки, а также навигационных вычислений для определения координат потребителя. В то же время в вычислителе ЦНП не была запроектирована внутренняя энергетически независимая память для хранения программ. Объем оперативной памяти был выбран достаточным для хранения программы сигнальной обработки и соответствующих данных, или, в альтернативном варианте, достаточным для хранения только данных, используемых в полном комплекте программ сигнальной и навигационной обработки. В последнем случае программы должны исполняться из внешней памяти, подключаемой к ЦНП по специальному интерфейсу.
Кристалл ЦНП был изготовлен по технологическим нормам 64 нм. На базе кристаллов РЧП и ЦНП запроектирован ряд многокристалльных модулей (Multichip Module, MCM). К настоящему времени испытаны два варианта МСМ. Первый включает в себя два кристалла РЧП — для GPS и ГЛОНАСС соответственно, и кристалл ЦНП. МСМ размещен в корпусе FBGA-125 размерами 8×7 мм и реализует host-based вариант приемника. Блок-схема МСМ приведена на рис. 3.

Рис. 3. Блок-схема МСМ host-based варианта приемника
Программы цифровой обработки исполняются встроенным вычислителем ЦНП МСМ в собственной оперативной памяти, и «сырые» измерения выдаются во внешний процессор пользовательской системы, где и выполняется навигационное решение.
Второй вариант МСМ оптимизирован для потребителей, которые намерены минимизировать стоимость и/или энергопотребление приемника за счет отказа от функциональности ГЛОНАСС. Модуль включает в себя один РЧП, ЦНП, Flash-память и импульсный преобразователь напряжения. МСМ размещен в корпусе FBGA-165 размерами 8×6 мм и реализует полный (stand alone) вариант GPS-приемника. Блок-схема этого варианта применения МСМ представлена на рис. 4.

Рис. 4. Блок-схема МСМ полного (stand alone) варианта приемника
Все программы (цифровой обработки сигналов и навигационной обработки) исполняются встроенным вычислителем ЦНП МСМ из Flash-памяти, а данные хранятся в оперативной памяти ЦНП. Без дополнительных элементов приемник — односистемный (GPS); функциональность ГЛОНАСС может быть добавлена с помощью второго (внешнего) РЧП.
Приведенные примеры построения модулей МСМ на базе разработанных кристаллов и их применения в приемнике GPS/ГЛОНАСС показывают достаточную гибкость принятых архитектурных решений. Еще одним преимуществом избранного пути с двумя самостоятельными настраиваемыми РЧП является возможность использовать в приемнике как совмещенную антенну GPS/ГЛОНАСС, так и две раздельные антенны. Таким образом, открывается путь к организации режима работы приемника по одной из СРНС на разнесенные антенны, о преимуществах которого сообщалось, например, в [5]. Потенциально прием на разнесенные антенны позволяет повысить отношение сигнал/шум при работе в сложных условиях, например в городских каньонах или в помещении.
Результаты испытаний
Широко распространено мнение, что приемник ГЛОНАСС (или совмещенный GPS/ГЛОНАСС) сложнее из-за используемого в ГЛОНАСС частотного разделения сигналов. Это мнение, по крайней мере, неточно. Правильнее утверждать, что повышенная сложность совмещенного приемника GPS/ГЛОНАСС определяется главным образом отличием частотного диапазона сигналов стандартной точности двух СРНС: для GPS это, прежде всего, L1 = 1575,42 МГц, а для ГЛОНАСС — 14 частот в диапазоне 1602 МГц. В рассматриваемой архитектуре приемника требование приема второго частотного диапазона приводит к появлению второго РЧП и второго тракта обработки отсчетов в ЦНП, включая отдельный буфер памяти для хранения отсчетов. Добавленное для этого оборудование в ЦНП составляет примерно 5–6% общей площади кристалла. В то же время добавленный цифровой тюнер частотного разделения составляет всего 0,7% от общей площади кристалла ЦНП.
Подробное изучение преимуществ двухсистемного приемника СРНС должно стать предметом дальнейших исследований. В данной статье мы приведем только несколько примеров сравнения работы приемника в режиме только GPS и в совмещенном режиме GPS/ГЛОНАСС, полученных в ходе испытаний создаваемого устройства. Идентичность условий для двух режимов обеспечивалась записью оцифрованных отсчетов с выходов РЧП и последующим их воспроизведением и пост-обработкой цифровой частью приемника, работающей, соответственно, в односистемном или совмещенном режимах. Заметим, что на момент написания статьи в розничной продаже были представлены изделия уже четырех производителей навигаторов на чипсете Mstar, и следует рассчитывать на то, что вскоре будут опубликованы отчеты разработчиков по его использованию.
Первая часть испытаний проводилась на территории о. Тайвань, в том числе и при езде в тоннеле, одна из стен которого закрыта не полностью (рис. 5). При проезде вдоль сплошной стены (в сторону наблюдателя, рис. 5) навигация была неудовлетворительной — как в режиме GPS, так и в совмещенном GPS/ГЛОНАСС. Проезд в обратном направлении вдоль полуоткрытой стены (от наблюдателя, рис. 5) представляет собой тот пограничный случай, когда двухсистемная навигация демонстрирует очевидные преимущества.

Рис. 5. Автомобильный тоннель, о. Тайвань
На рис. 6 приведены траектории местоопределений для двух режимов. Автомобиль двигался справа налево. Длина тоннеля — около 2200 м, время проезда тоннеля составляло чуть менее 2 мин. (110–112 с). Начало траекторий соответствует моменту въезда в тоннель. В режиме GPS слежение за достаточным количеством сигналов (три-четыре) и местоопределение продолжается еще около 25 с после въезда в тоннель. Примерно в начале последней трети траектории есть второй участок с успешным местоопределением продолжительностью 10 с. В режиме GPS/ГЛОНАСС местоопределение имело место в течение всего проезда.

Рис. 6. Траектории местоопределений при работе по GPS и GPS/ГЛОНАСС в тоннеле (GPS — синяя линия; GPS+ГЛОНАСС — зеленая)
Во время указанного проезда в тоннеле на выбранном для анализа интервале в 30 с отношение мощности несущей принимаемых сигналов к спектральной мощности шума C/N0 составляло 16–30 дБГц, в среднем — 22,1 дБГц. Графики изменения количества сигналов, по которым осуществлялись навигационные измерения, приведены на рис. 7. При работе в режиме GPS количество принимаемых сигналов большую часть времени составляло от двух до трех, что недостаточно для трехмерной навигации, а на интервалах приема четырех сигналов GPS геометрический фактор по большей части был неудовлетворительным. В режиме GPS/ГЛОНАСС почти все время проезда в тоннеле принималось от пяти до восьми сигналов СРНС, что позволило получать непрерывное местоопределение. В то же время отмеченный низкий уровень мощности принимаемых сигналов свидетельствует о том что, практически, все они претерпевали многолучевое распространение.
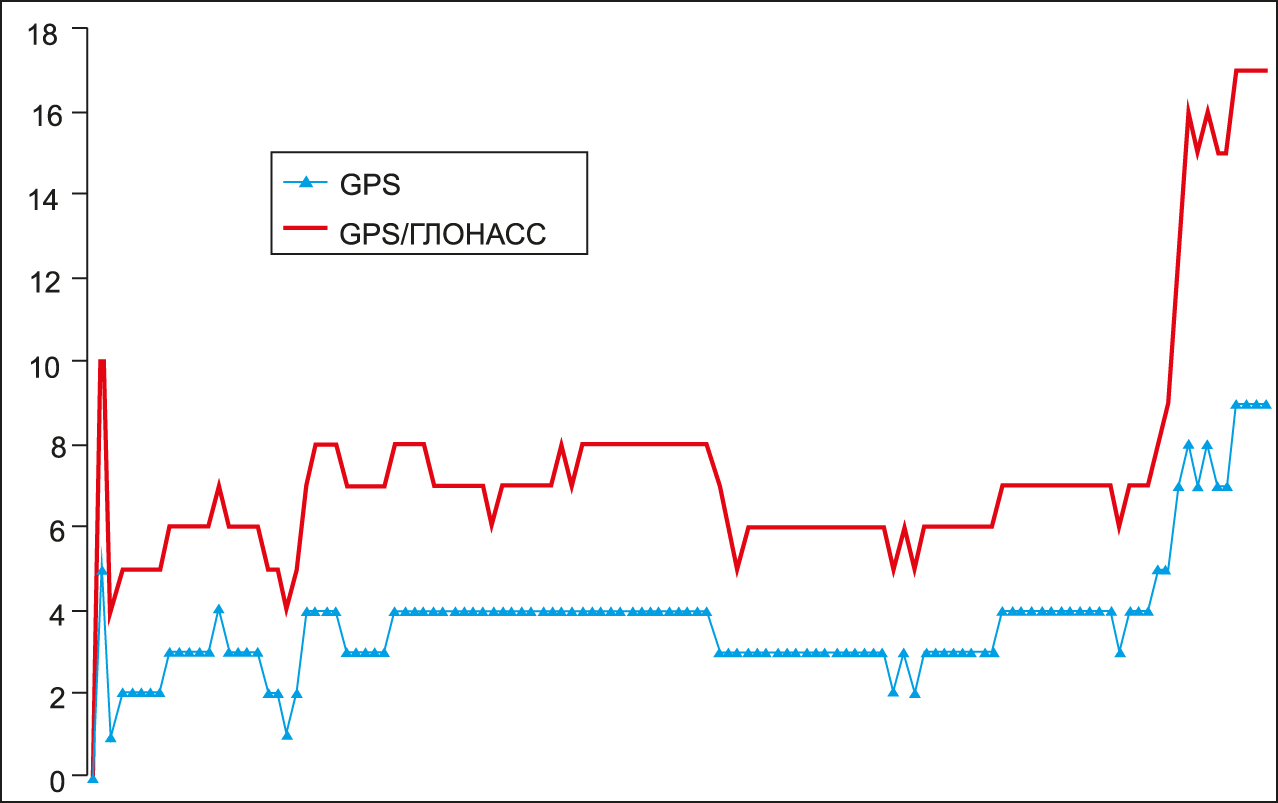
Рис. 7. Количество сигналов КА СРНС GPS и GPS+ГЛОНАСС, принимавшихся при проезде тоннеля

Рис. 8. Траектории в трех режимах: GPS (синий), ГЛОНАСС (красный) и GPS+ГЛОНАСС (зеленый)
Далее, на рис. 8 и 9, представлены траектории проезда и количество КА в навигационном решении во время второй серии испытаний, также проводившейся на территории о. Тайвань, в трех режимах работы приемника: GPS, ГЛОНАСС и GPS+ГЛОНАСС. Результаты иллюстрируют повышение точности местоопределений в условиях плотной городской застройки в совмещенном режиме (рис. 10). Очевидным объяснением причины повышения точности служит почти двукратное увеличение числа КА, используемых в навигационном решении.

Рис. 9. Количество КА в навигационном решении для трех режимов работы

Рис. 10. Район плотной городской застройки
Заключение
Разработанный совмещенный приемник СРНС GPS/ГЛОНАСС отвечает всем рыночным требованиям к приемникам GPS и добавляет новое качество — надежность и точность местоопределений в сложных условиях, привносимые за счет увеличения числа принимаемых сигналов (СРНС ГЛОНАСС).
Первые результаты испытаний показывают, что существуют пограничные сценарии применения приемника, в которых использование второй СРНС дает значительное улучшение качества навигации.
В избранной архитектуре приемника увеличение сложности определяется появлением второго РЧ-преобразователя и увеличением примерно на 6% цифровой части приемника. Вызванное этими причинами увеличение стоимости приемника приводит к несущественному росту цены навигатора. Так, например, в августе 2011 г. один из авторов статьи приобрел двухсистемный навигатор на чипсете Mstar менее чем за 4000 рублей.
- O’Driscoll , Lachapelle G., Tamazin M. Dynamic Duo // GPS World. January, 2011.
- Frank van Diggelen. Down and Deep // GPS World. December, 2010.
- Shengyue Ji, Wu Chen, Xiaoli Ding, Yongqi Chen, Chunmei Zhao, Congwei Hu. Potential Benefits of GPS/GLONASS/GALILEO Integration in an Urban Canyon — Hong Kong // The Journal of Navigation. № 63.
- Михайлов Н. В. Коммерциализация ГЛОНАСС — стереотипы и реальность // Доклад на конференции «Оборудование спутниковой навигации, модули и электронные компоненты. Производство и технологии». М. 2010.
- John Nielsen, Surendran K. Shanmugam, M. Upal Mahfuz, Gerard Lachapelle. Enhanced Detection of Weak GNSS Signals Using Spatial Combining // Journal of the Institute of Navigation. Vol. 56. 2009. № 2.
 3 ноября, 2020
3 ноября, 2020 17 августа, 2020
17 августа, 2020 12 августа, 2019
12 августа, 2019