
Тестирование точности определения траектории в режиме PPP-RTK спутниковым приемником 4GNSS ОС-103
Как известно, абсолютный метод определения координат характеризуется невысокой точностью: 3–15 м. Однако если использовать уточненные эфемериды и уходы часов, то абсолютный метод может обеспечивать субдециметровую (менее 10 см) точность. Именно таким образом реализуется метод PPP, или Precise Point Positioning (рис. 1).
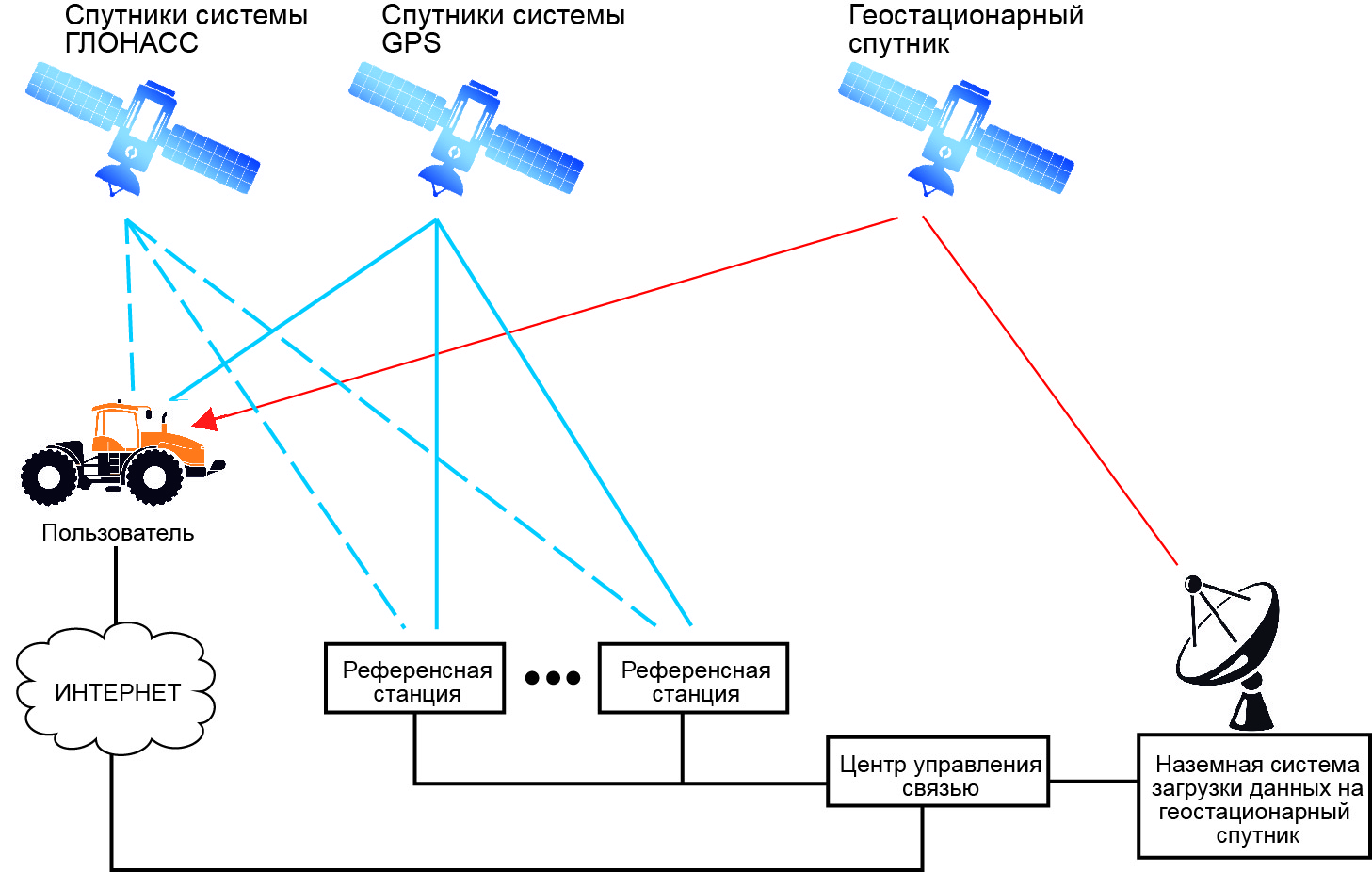
Рис. 1. Схема метода PPP (Precise Point Positioning)
Основная задача спутниковой навигации по определению координат заключается в решении обратной пространственной засечки, где за исходные пункты принимаются спутники, а определяемый — на поверхности земли. Метод PPP представляет собой то же решение обратной пространственной засечки, но точность координат исходных пунктов гораздо выше (в данном случае за счет эфемерид), а временная шкала приведена к времени навигационной системы, что позволяет более точно вычислить псевдодальности.
Референсные станции производят спутниковые измерения и передают в центр управления сетью, где на их основе генерируются поправки PPP-SSR (State Space Representation). Поток поправок передается на ГНСС-оборудование пользователя через Интернет либо через геостационарный спутник (после загрузки данных через наземную систему загрузки).
Условно метод можно разделить по способу обработки ГНСС-данных:
- PPP — при постобработке в специальных ПО, например GrafNav;
- PPP-RTK — при обработке данных в режиме реального времени с уточненными эфемеридами и моделью ухода шкалы часов.
Для реализации режима PPP-RTK требуется источник корректирующей информации в специальном формате. В зависимости от типа ГНСС-приемника таким источником могут быть платные сервисы (RTX, TerraStar и др.) либо поток поправок в формате RTCM-SSR.
Поскольку метод Precise Point Positioning набирает все большую популярность, а в идеале должен упростить работу во многих областях — кадастровых, геофизических и высокоточных логистических приложениях в труднодоступных районах, то мы решили провести небольшой тест и сравнить данные, полученные в режиме PPP-RTK, с данными, полученными стандартным методом постобработки (PPK).
Результатом измерений должны стать два набора данных:
- PPK (Post Processing Kinematic — кинематика в постобработке);
- PPP-RTK (PPP в реальном времени).
Для теста мы использовали в качестве подвижного спутникового приемника 4GNSS ОС-103, так как он поддерживает работу по всем доступным спутниковым системам: GPS, ГЛОНАСС, BeiDou, Galileo, а также способен принимать поправки RTCM-SSR. Такие поправки мы получали от сервиса MADOCA.
Приемник был установлен на автомобиле и одновременно:
- записывал спутниковые измерения для постобработки траектории (реализация режима PPK), как и базовая станция, находящаяся на пункте, точно определенном в системе координат ITRF08 на эпоху 2019.1 на удалении около 1 км (рис. 2);
- принимал поправки PPP-SSR для определения координат траектории в режиме реального времени через Интернет.

Рис. 2. Траектория в PPK-режиме, обработанная от БС (зеленый — фиксированное решение)
Первые 10 мин теста длился период сходимости (стандартно продолжается около 15 мин для режима PPP-RTK). Во время движения поток поправок RTCM-SSR был искусственно прерван единожды для определения влияния отсутствия потока корректирующей информации на режим PPP-RTK (рис. 3).

Рис. 3. Траектория PPP-RTK (голубой — режим PPP-RTK, красный — автономный режим)
В качестве эталонной траектории мы приняли данные PPK, как более надежные и точные. Также все системы координат были приведены к ITRF08 на эпоху 2019.1. Для определения точности и достоверности траектории, полученной разными способами, использовали разность координат.

Рис. 4. Начало траектории, период сходимости
На рис. 4 видно, что первые 5 мин автомобиль стоял на месте, а затем начал движение. Так как период сходимости длится дольше, то еще некоторое время (около 5 мин) точность определения координат в режиме PPP-RTK была близка к автономной (рис. 5).

Рис. 5. Точность в начале траектории, период сходимости не завершен
Как только сходимость была достигнута, траектория PPP-RTK прекрасно легла на траекторию PPK (рис. 6). Разность плановых координат не превышает 10 см, а разница высотных — 30 см.

Рис. 6. Сверху проходит траектория PPP-RTK на обратном пути автомобиля и в данном тесте не рассматривается
В определенный момент мы прервали прием потока поправок PPP-SSR, этот момент видно на рис. 7. Результат получен весьма ожидаемый: решение снова стало автономным, а разница координат становилась все больше (рис. 8).

Рис. 7. Прекращение приема поправок PPP-SSR

Рис. 8. Точность определения координат при прекращении приема поправок PPP-SSR
Следует отметить, что это наш первый тест режима PPP на приемнике ОС-103 с новой прошивкой. Но даже подобный результат вполне может устроить тех пользователей ГНСС-оборудования, кому плановой точности в 10 см, а высотной — в 30 см достаточно! В таком случае пользователь может работать с одним двухчастотным ГНСС-приемником независимо от расстояния до базовой станции, что станет отличным решением для применения в точном земледелии, логистических работах и других высокоточных приложениях.
 17 февраля, 2014
17 февраля, 2014 22 ноября, 2013
22 ноября, 2013 18 августа, 2014
18 августа, 2014