
Сравнительное тестирование GPS/ГЛОНАСС-приемников для систем мониторинга подвижных объектов
Важной частью любой системы мониторинга являются навигационные приемники. В навигационном оборудовании российского производства с 2000 г. присутствовали приемники сигналов GPS импортного производства, но несколько лет назад стали появляться и персональные трекеры со встроенными ГЛОНАСС/GPS-приемниками. Изначально на коммерческом рынке присутствовали только двухсистемные устройства, произведенные на российских предприятиях, которые стоили существенно дороже, а работали хуже GPS-аналогов импортного производства: энергопотребление было в десятки раз выше, чувствительность на столько же децибел хуже, размеры больше и т. д.
Но последние три-четыре года разработчики двухсистемных навигационных приемников не стояли на месте. Выпускаемое ими оборудование постоянно совершенствовалось. Новые устройства все больше приближались к импортным GPS-приемникам по своим потребительским качествам: точности, чувствительности, времени старта, габаритам, энергопотреблению и цене. В 2011 г. были выпущены первые навигационные чипсеты с поддержкой двух спутниковых систем (ГЛОНАСС и GPS) импортного производства, и спустя несколько месяцев многие российские и зарубежные компании начали изготавливать на их основе свои навигационные ГЛОНАСС/GPS-приемники.
Почти весь функционал навигационного приемника и почти все его характеристики определяются тем, какой процессор (или чип) установлен у него внутри. Существует ограниченное количество производителей ГЛОНАСС/GPS-чипсетов: MTK, ST, Qualcomm, u-blox и ряд других, в том числе и отечественных («Навис», «ГеоCтар навигация»). Техническое развитие в отрасли производства навигационных приемников, чипов и модулей на текущий момент дошло до того, что эти чипы уже практически не требуют обвязки. В результате выпустить собственный ГЛОНАСС/GPS-приемник может практически любая компания — достаточно иметь в штате нескольких грамотных инженеров. Например, ГЛОНАСС/GPS-приемники Fastrax IT600, Quectel L16, Telit SL869, НАВИА GL8088s и SimCom Sim68 имеют общую платформу в виде чипсета STA8088 от компании STMicroelectronics.
Испортить характеристики чипа тоже возможно, если квалификация инженеров окажется недостаточной или производитель сэкономит на внешних компонентах обвязки чипсета (входной фильтр, емкости и т. д.). В этих условиях приходится выбирать не столько конкретную модель, сколько качественный чипсет и компетентного производителя.
Конкуренция на рынке ГЛОНАСС/GPS-приемников приобрела чрезвычайно острый характер. Практически каждый месяц, если не чаще, производители выпускают новые модификации своих навигационных устройств или совершенствуют встроенное программное обеспечение уже существующих изделий с целью улучшения тех или иных технических характеристик.
Сложилась негласная традиция сравнивать любой «двухсистемник» с приемником GPS. Это связано с тем, что GPS давно развивается как коммерческая система, выпущено множество поколений устройств, коммерческая эксплуатация которых давно и успешно идет по всему миру. Прежде чем начинать разговор о различных способах сравнительного тестирования современных ГЛОНАСС/GPS-приемников, следует определить требования, которые к ним предъявляет современный рынок.
Во-первых, это высокая чувствительность. У современных GPS-приемников она достигает –165 дБм. Это важная характеристика, особенно для приборов со скрытной установкой с ограниченной видимостью открытого неба.
Во-вторых, низкое энергопотребление. Здесь, оглядываясь на приемники GPS, ожидается получить величину не более 100 мА. Современные GPS-устройства уже давно имеют энергопотребление не более 30–35 мА. Этот параметр особенно важен для систем персонального мониторинга и скрытого слежения. Например, в системе персонального мониторинга с автономным питанием приемник должен работать от встроенного аккумулятора порядка 2–3 лет. Очевидно, для подобных систем энергопотребление является крайне важной характеристикой.
В-третьих, миниатюрность. Некоторые образцы приемников GPS имеют размер порядка 10×10 мм и даже меньше. Наглядным примером является SE880 от Telit Wireless Solutions. Его размеры составляют 4,7×4,7 мм, и присутствует возможность работы как с активной, так и с пассивной антенной. Это очень важно для персональных трекеров и автономных охранно-поисковых систем.
Не на последнем месте стоит и поддержка A-GPS. Возможность работы с различными системами Assisted GPS является значительным преимуществом приемника, поскольку в этом случае он может осуществлять «теплый» и «горячий» старт в разы быстрее, чем устройство, не обладающее поддержкой этих систем. В целом, системы типа A-GPS можно разделить на две основные категории: автономные и использующие внешний веб-ресурс. В первом случае эфемериды спутников рассчитываются внутри самого приемника. Как правило, время действия данных внутреннего расчета меньше, чем у систем второго типа (в среднем 3–5 дней). Во втором случае используются вычислительные ресурсы внешнего сервера. При этом требуется возможность обеспечить загрузку файла с вычисленными эфемеридами с внешнего интернет-ресурса. Как правило, эту возможность обеспечивает GSM-модуль.
И, конечно же, большое значение имеет цена. Очевидно, что конечный пользователь не должен платить за использование двухсистемного приемника GPS/ГЛОНАСС больше, чем односистемного с поддержкой только GPS.
В средствах массовой информации постоянно появляются результаты сравнительных тестов актуальных на данный момент ГЛОНАСС/GPS-приемников. Немалые усилия направляются на то, чтобы выяснить, какой из приемников лучше работает в тех или иных условиях. Разработчику, перед которым стоит задача выбора того или иного навигационного приемника для решения определенной задачи, приходится анализировать огромные объемы информации. Можно с уверенностью сказать, что большая часть информации в СМИ о результатах тестирования и сравнения между собой различных навигационных устройств не только не вносит ясности в ситуацию, но еще больше запутывает и искажает истинное положение вещей. Причин этому несколько.
Сравнительное тестирование навигационных приемников в лабораторных условиях является достаточно дорогостоящей и длительной по времени процедурой. Она по карману далеко не всем предприятиям, занимающимся разработкой навигационного оборудования. Дорогостоящее и длительное по времени лабораторное тестирование навигационных приемников нецелесообразно по причине очень частого обновления их аппаратного и программного обеспечения (ПО). Пока происходит процесс лабораторного тестирования одной версии приемника, уже успевает выйти более новая, что делает испытания предыдущей версии бессмысленными.
Каждый производитель ГЛОНАСС/GPS-приемников выпускает так называемые демонстрационные и отладочные средства (платы), позволяющие конечному пользователю легко и быстро запустить в работу интересующий его приемник. Для этого, как правило, просто достаточно подключить соответствующую демо-плату с ГЛОНАСС/GPS-приемником к персональному компьютеру и запустить специальную программу, позволяющую выводить на экран компьютера различные параметры работы данного устройства. Понятно, что производители стараются тем или иным образом подчеркнуть достоинства и скрыть недостатки своего продукта, часто вводя таким образом конечного пользователя в заблуждение. В таких случаях проблемы проявляются на этапе разработки или эксплуатации конечного изделия в виде возникновения различных аппаратных сбоев или программных ошибок, не описанных в технической документации на приемник. Общеизвестно и то, что производители ГЛОНАСС/GPS-приемников выпускают собственное ПО для персонального компьютера, позволяющее производить наглядную проверку работоспособности устройства. Данное ПО часто использует дополнительные алгоритмы обработки, предназначенные для облегчения восприятия данных, выдаваемых навигационным приемником. Каждая программа предоставляет пользователю собственный уникальный интерфейс. Зачастую способ представления информации в таких программах различен, что затрудняет сравнительный анализ выдаваемых ими характеристик. Положение усугубляется тем, что, как упоминалось раньше, каждый производитель снабжает свои навигационные приемники собственным протоколом работы. Тем временем существует единый общепринятый протокол NMEA [1] для представления навигационной информации, выдаваемой ГЛОНАСС/GPS-приемником. Каждый производитель приемников, помимо собственного протокола, внедряет в своих приемниках и протокол NMEA. С одной стороны, это упрощает задачу сравнительного тестирования ГЛОНАСС/GPS-приемников различных производителей. Но, с другой стороны, как показывает практика, количества информации, выдаваемой по протоколу NMEA, недостаточно для решения некоторых навигационных задач. К тому же данный протокол реализуется разными производителями в своих ГЛОНАСС/GPS-приемниках несколько по-разному: отличаются состав информационных предложений NMEA, последовательность их выдачи и т. д.
Отсутствуют общепринятые стандарты или рекомендации по сравнительному тестированию ГЛОНАСС/GPS-приемников в полевых условиях, без использования специального дорогостоящего оборудования. До сих пор остается открытым вопрос о том, как создать одинаковые условия испытаний для всего набора ГЛОНАСС/GPS-приемников, подлежащих исследованию. Тестирование ГЛОНАСС/GPS-приемников с помощью демонстрационных плат в полевых условиях, как правило, носит субъективный характер: результат зависит от множества случайных факторов, таких как:
- Приемная антенна. Зачастую производители рекомендуют использовать со своими ГЛОНАСС/GPS-приемниками конкретные антенны, которые часто бывают несовместимы между собой, например, по величине напряжения питания. Даже одинаковые антенны из одной серийной партии могут отличаться своими параметрами.
- Время тестирования. В разное время испытаний разных ГЛОНАСС/GPS-приемников в небе присутствует различное количество спутников. Погодные условия, влияющие на процесс распространения радиоволн, тоже могут быть разными.
- Место тестирования. Например, тестирование двух одинаковых ГЛОНАСС/GPS-приемников из одной серийной партии в одно и то же время, но в различных участках земной поверхности, может давать совершенно разные результаты.
Сравнительным тестированием ГЛОНАСС/GPS-приемников в полевых условиях и опубликованием результатов тестирования может заниматься практически любое заинтересованное лицо. Процесс такого тестирования не представляет из себя ничего сложного. Достаточно иметь на руках демонстрационную плату с ГЛОНАСС/GPS-приемником (либо сам приемник) и персональный компьютер с установленной программой тестирования. Еще желательно (но не обязательно) иметь транспортное средство (например, автомобиль) для удобства перемещения.
Таким образом, при проведении сравнительного тестирования нескольких ГЛОНАСС/GPS-приемников необходимо, как минимум, предварительно определиться с набором устройств. В пределах определенной выборки необходимо классифицировать ГЛОНАСС/GPS-приемники по следующим параметрам:
- Чипсет, положенный в основу приемника. Часто бывает, что один и тот же производитель изготавливает свои навигационные приемники на основе различных чипсетов. И наоборот, различные производители изготавливают свои приемники на базе одинаковых чипсетов. В этом случае необходимо принимать во внимание технические особенности того или иного чипсета, ибо они могут отличаться друг от друга напряжением питания, настройками встроенного программного обеспечения, совместимостью или несовместимостью с различными типами приемных антенн. Приемники, изготовленные на основе одинаковых чипсетов, необходимо привести в максимально схожее состояние с помощью программных настроек (скорость обмена данными по последовательному интерфейсу, включение/отключение различных способов фильтрации выдаваемых данных, включение/отключение режимов пониженного энергопотребления).
- Производитель. Возникают ситуации, когда одна фирма выпускает навигационные приемники на базе различных чипсетов, используя при этом единый алгоритм при программной настройке параметров устройств (поддержка одинаковых режимов пониженного энергопотребления, использование для вывода навигационной информации одинаковых протоколов и т. д.).
- Протокол, используемый для вывода навигационной информации во внешние устройства. Как было отмечено, один и тот же производитель ГЛОНАСС/GPS-приемников, как правило, использует в своих приемниках для вывода навигационной информации единый протокол.
- Напряжение питания приемной антенны. Различные приемники могут работать с приемными антеннами с различным напряжением питания.
- Коэффициент усиления приемной антенны. Различные приемники могут поддерживать работу с антеннами с различным коэффициентом усиления.
Далее следует составить перечень навигационных параметров, представляющих наибольший интерес. Например, при онлайн-мониторинге автотранспорта часто требуется, чтобы координаты точки местоположения, выдаваемые навигационным приемником, создавали как можно меньше случайных флуктуаций, пока транспортное средство стоит на месте, поскольку они создают существенные ошибки при оценке пробега транспортного средства
и, соответственно, при оценке расхода горючего. Не менее важно определиться с математическими методами, которые предполагается использовать для обработки интересующего навигационного параметра. Например, при оценке пробега транспортного средства и расхода горючего по замерам, полученным с помощью навигационного приемника, случайные флуктуации измеренных координат могут подвергаться программной фильтрации. С этой точки зрения предпочтительнее оказывается тот навигационный приемник, который совершает редкие флуктуации, но с большой средней амплитудой. Ситуации, когда измеренное приемником местоположение транспортного средства изменилось на величину больше, чем транспортное средство физически могло осуществить, могут быть легко отфильтрованы на программном уровне конечного навигационного устройства. Важно также сделать правильный выбор среди математических методов, которые позволяют наиболее полно осуществить оценку интересующего навигационного параметра в результате тестирования.
Статическое тестирование
В статическом тесте при оценке случайных флуктуаций измеренного навигационным приемником местоположения наиболее тривиальным является использование такого параметра, как общая величина смещения L измеренного местоположения за фиксированное время T или за фиксированное количество замеров N = T/∆t, где ∆t — временной интервал выдачи приемником информации о координатах измеренного местоположения (обычно ∆t = 1 с):

где а0— радиус-вектор, показывающий точку отсчета или истинное местоположение объекта, а аi— радиус-вектор, показывающий измеренное приемником местоположение. Оба параметра могут быть охарактеризованы двумя способами: географическими координатами (широта и долгота) или своими проекциями на координатные оси x и y на плоскости, на которой ведется определение местоположения подвижного объекта. Тот приемник, который покажет наименьшее значение параметра L в статическом тесте, окажется наиболее предпочтительным для использования в системе онлайн-мониторинга транспортного средства при прочих равных условиях. Однако в ряде случаев параметр L может быть неинформативен. Два разных навигационных приемника в статическом тесте могут показать одинаковое значение L. При этом один из приемников будет совершать малое количество флуктуаций с большой амплитудой, а второй — большое количество с малой амплитудой. В таком случае при тестировании наиболее целесообразно использовать такой параметр, как среднеквадратическое отклонение s [2] измеренных значений местоположения ai от некоторого эталонного значения а0.

где N — количество измерений местоположения, сделанных приемником. В качестве эталонного значения местоположения а0может быть выбрано расчетное значение координат, определенное теоретически по навигационной карте, например с помощью сервисов Yandex Maps или Google Maps. Либо в данном качестве можно выбрать одно из определенных экспериментально значений географических координат аk, полученное при помощи тестируемого навигационного приемника. Среднеквадратическое отклонение в данном случае будет иметь физический смысл средней амплитуды отклонения координат, измеренных приемником, от выбранного эталонного значения.
Предположив, что оценки географических координат имеют несмещенный характер, не содержат систематической ошибки, за эталонное значение местоположения а0можно принять среднее значение [3] географических координат местоположения:
Лучшим может считаться тот навигационный приемник, который имеет меньше параметр s.
На рис. 1 изображены случайные флуктуации местоположения, измеренного двумя разными ГЛОНАСС/GPS-приемниками («ГеоС-3» производства КБ «ГеоСтар навигация» и EB-800A производства компании Transystem) в течение 24 ч при статическом тестировании (неподвижной приемной антенне). Параметр L у обоих приемников оказался практически одинаковый. Приемник «ГеоС-3» совершил за данное время случайных флуктуаций в сумме на 15530 м, а EB-800A — 15041 м. При этом приемник «ГеоС-3» показал ряд больших флуктуаций измеренного местоположения («гнездо» оказалось более размытое), а приемник EB-800A — множество мелких флуктуаций («гнездо» на рисунке более плотное и компактное).

Рис. 1. Примеры случайных флуктуаций местоположения, измеренного приемниками в течение 24 ч при статическом тесте:
а) Геос-3;
б) EB-800A
Тем не менее значение s у обоих приемников отличается весьма заметно. За время тестирования «ГеоС-3» показал среднеквадратическое отклонение широты и долготы 0,0001954° и 0,0004256° соответственно. А приемник EB-800A — 0,0001134° и 0,0002458°. Это заставляет сделать вывод о том, что с чисто теоретической точки зрения из двух приемников, подвергнутых статическому тесту, лучше оказывается приемник EB-800A. Но если принять во внимание практические аспекты работы навигационного приемника в реальном устройстве, то окажется, что резкие смещения местоположения, показанные «ГеоС-3», легко отфильтровываются на программном уровне (исходя из тех соображений, что реальное транспортное средство или подвижный объект физически не способно совершать перемещения с такой скоростью). Введение такой фильтрации позволит ощутимо сократить значение параметра L для навигационного приемника «ГеоС-3». Это означает, что величина ложных перемещений транспортного средства или подвижного объекта, оцененных с его помощью, окажется меньше. Ошибка при расчете количества горючего, потребленного транспортным средством, соответственно, тоже. А значит, следует сделать вывод о том, что навигационный приемник «ГеоС-3» оказывается более предпочтительным для использования в задачах онлайн-мониторинга транспортных средств, чем EB-800A. Отсюда следует, что подход, связанный с определением среднеквадратического отклонения s, тоже характеризует поведение навигационного приемника в статическом тесте недостаточно исчерпывающе.
В технической документации [4–10] на каждый приемник производителем обычно заявляется теоретически рассчитанное значение точности определения местоположения.
Обычно для всех современных ГЛОНАСС/GPS-приемников это значение не превышает 2,5 м (табл. 1). Это означает, что теоретический разброс значений, выдаваемых устройством, должен укладываться в область диаметром 2,5 м. На практике же, как показано на рис. 1, реальный разброс значений, выдаваемых приемником, может значительно превышать заявленную в документации погрешность. Поэтому правильнее говорить о вероятности P(|a–a0|≤r) того, что точка a с измеренными приемником координатами попадет в окружность радиуса r с центром в точке a0, где r равен половине заявленной производителем погрешности определения местоположения (например, 2,5/2 = 1,25 м), а a0— истинное значение местоположения. Очевидно, что тот приемник, у которого будет больше значение P(|a–a0|≤r), должен считаться более точным.
|
|
Геос-3 |
EB-800A |
Sim68 |
Sim68R |
MGGS2217 |
ML8088S |
SL869 |
|
Производитель |
КБ «ГеоСтар навигация» |
Transystem |
SimCom |
SimCom |
Satron Electronics |
PetroInTrade |
Telit |
|
Чипсет |
GS3001MP-100 |
MT3333 |
STA8088FG |
MT3333 |
MSR2112 RF, MSB2311 CPU |
STA8088FG |
STA8088FG |
|
Точность |
2,5 |
2,5 |
2 |
2 |
2 |
2 |
2 |
Оценить P(|a–a0|≤r) визуально, построив графики, подобные показанным на рис. 1, не представляется возможным. Визуально можно лишь оценить размеры «гнезда», образованного показаниями навигационного приемника. Но судить о том, что приемник с большим «гнездом» является менее точным, чем с меньшим, было бы ошибочно. Данное «гнездо» имеет неодинаковую плотность на всем своем протяжении. Априори можно утверждать, что плотность «гнезда» будет увеличиваться при приближении к его геометрическому центру, который должен совпадать с местоположением точки a0 (если приемник работает заведомо исправно и не создает дополнительной систематической погрешности измерений). Это связано с тем, что точка с измеренными приемником координатами будет чаще попадать в те области, которые ближе к истинному значению местоположения a0.
Для оценки вероятности P(|a–a0|≤r) необходимо знать функцию плотности вероятности f(a) [11]. Тогда
Для вычисления интеграла (5) удобно представить параметр a, определяющий местоположение объекта на плоскости навигационной карты, в виде отдельных составляющих. В качестве составляющих можно использовать широту и долготу. Но более наглядно будет в данном случае представить параметр a в виде двух проекций axи ayна координатные оси x и y на плоскости, где определяется местоположение подвижного объекта: f(a) = f(ax, ay). Тогда выражение (4) можно переписать следующим образом:

Функцию плотности распределения вероятности f(ax, ay) можно оценить статистически в ходе тестирования навигационного приемника. Навигационный приемник выдает оценку географических координат a (широта) и b (долгота) своего местоположения a. Зная эти координаты, можно вычислить проекции радиус-вектора, проведенного из точки начала отсчета (a = 0 и b = 0) в точку a, на оси x и у в воображаемой системе координат следующим образом:
ax= a × RЗемли; ay= bcos(a) × RЗемли,
где RЗемли— радиус земного шара в метрах (обычно принимается RЗемли= 6371030 м) [12].
Экспериментально было установлено, что плотность распределения вероятностей f(ax, ay) может быть разбита на два независимых друг от друга множителя: f(ax, ay) = fx(ax)fy(ay). Составляющие fx(ax) и fy(ay) могут быть описаны нормальными (гауссовскими) законами распределения [11]:
где среднеквадратические отклонения sxи syи средние значения –axи –ay параметров ax и ay вычисляются по формулам (2) и (3) соответственно, по данным, полученным от навигационного приемника в ходе статического тестирования.
В качестве проверки гипотезы о соответствии полученных экспериментальных результатов нормальному распределению был использован критерий Колмогорова–Смирнова [13]. Критерий используется для того, чтобы определить, подчиняется ли экспериментальное распределение случайной величины предполагаемой модели.
Проверка по критерию Колмогорова–Смирнова подтвердила предположение о том, что при увеличении количества N статистических данных, полученных в ходе тестирования навигационного приемника, плотность распределения вероятностей стремится к нормальному закону. Этот результат хорошо согласуется с центральной предельной теоремой теории вероятностей. Минимальное количество данных N, при котором закон распределения вероятностей можно считать нормальным, равняется 90 000. Если принимать темп выдачи навигационной информации равным 1 Гц, то из этого следует вывод о том, что для получения достоверных результатов тестирование навигационного приемника необходимо выполнять не менее суток (86 400 с).
Критерий Колмогорова–Смирнова отличается сравнительно невысокой вычислительной сложностью и может быть применен в тех случаях, когда плотность распределения вероятности показаний навигационного приемника имеет тяжелые «хвосты» (то есть когда показания навигационного приемника имеют существенный разброс, значительно превышающий погрешность, заявленную в технической документации). В этом случае для подтверждения гипотезы о нормальном распределении показаний навигационного приемника с помощью критерия Колмогорова–Смирнова необходимо увеличивать объем анализируемых данных N. Соответственно, время накопления данных в таком случае должно составлять от нескольких суток до недели.
Для снижения трудозатрат при тестировании можно ограничиться вычислением параметров sx, sy, –ax, –ayв законах распределения (6) и (7) и вычислить вероятность попадания точки a в область, ограниченную квадратом (рис. 2). Тем более что на практике рассмотрение прямоугольной области оказывается более наглядно, потому что автомобильные стоянки, территории складов и прочие городские сооружения обычно имеют прямоугольную форму.

На рис. 2 точка начала координат для наглядности перенесена в точку с координатами (–ax, –ay), потому что в идеальном случае (если навигационный приемник не создает систематической ошибки при измерениях) эти координаты должны совпадать с координатами истинного местоположения навигационного приемника согласно критерию максимального правдоподобия. Длина каждой из сторон квадратной области на рис. 2 равна половине величины точности измерения местоположения, заявленной в технической документации на навигационный приемник.
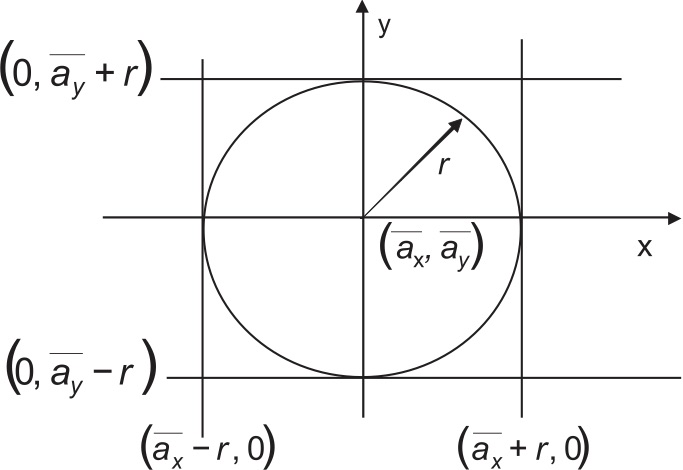
Рис. 2. Разновидности областей при оценке точности навигационного приемника
Искомая вероятность РК попадания точки a в квадратную область на рис. 2 будет определяться выражением: Интегралы в формулах (8) и (9) от выражений (6) и (7) не вычисляются в аналитической форме, но существует множество способов вычислить их приближенно, поскольку они достаточно хорошо табулированы. Стандартные функции для вычисления данных интегралов присутствуют во всех математических программах для ЭВМ (MathCad, MatLab, Maple и др.), а также в некоторых настольных калькуляторах.
Интегралы в формулах (8) и (9) от выражений (6) и (7) не вычисляются в аналитической форме, но существует множество способов вычислить их приближенно, поскольку они достаточно хорошо табулированы. Стандартные функции для вычисления данных интегралов присутствуют во всех математических программах для ЭВМ (MathCad, MatLab, Maple и др.), а также в некоторых настольных калькуляторах.
С помощью описанного выше метода можно оценить, например, вероятность того, что показания навигационного приемника не выйдут за пределы прямоугольной области парковки транспортных средств предприятия во время ночной стоянки. Можно также определить размеры территории парковки, достаточные для того, чтобы показания навигационного приемника, установленного на автомобиле, не выходили за ее пределы с некоторой наперед заданной вероятностью.
Вероятность P(|a–a0| ≤ r) попадания точки в окружность радиуса r в аналитической форме оценить затруднительно. Если предположить, что sx= sy, то закон распределения f(a) величины a в формуле (4) описывался бы известным и хорошо изученным распределением Рэлея–Райса [11]. Но, как будет показано ниже, равенство sx= sy, не выполняется. Поэтому для оценки вероятности P(|a–a0| ≤ r) можно воспользоваться приближенной методикой [11]. Необходимо произвести N измерений местоположения навигационным приемником в статическом тесте и посчитать число попаданий N|a – a0| ≤ r данных измерений внутрь окружности радиуса r (рис. 2). Тогда вероятность может быть оценена по приближенной формуле:
Этот же способ можно применить и для грубой оценки вероятности Pк в формуле (10):
Pк≈ Nкв/N, (12)
где Nкв— число попаданий точки внутрь квадратной области на рис. 2.
Можно предложить и другие критерии сравнения ГЛОНАСС/GPS-приемников. Например, сравнивать навигационные приемники по вероятности того, что разница между предыдущим измеренным местоположением (координаты измеренного навигационным приемником местоположения выдаются последовательно во времени) и текущим не превысит некоторого порогового значения. Например, если задаться максимально допустимой скоростью перемещения транспортного средства внутри населенного пункта 60 км/час, то максимальное расстояние, которое данное транспортное средство успеет проехать за 1 с (обычно навигационный приемник выдает координаты своего местоположения с интервалом 1 с), составит около 16,7 м.
В данный момент, с учетом всех перечисленных особенностей процесса статического тестирования ГЛОНАСС/GPS-приемников, разными инженерами предлагаются различные структурные схемы для тестового макета. На рис. 3 показана схема сравнительного тестирования нескольких навигационных приемников при подключении к одной приемной антенне.

Рис. 3. Схема одновременного подключения нескольких навигационных приемников к одной приемной антенне
Питание антенны заводится с отдельного источника через адаптер питания (2) (Bias Tee). Напряжение питания подводится к входу DC (SMA female). Для подключения источника необходим специально изготовленный кабель (6). Ко входу RF&DC (2) подключен адаптер SMA female–SMA female (1), с расчетом использования SMA male на антенном кабеле. Ко входу RF (2) подключен адаптер SMA male–SMA male (3), который с другой стороны подсоединен к входу S четырехвыводного сплиттера (4). Сплиттер имеет четыре выхода (1, 2, 3, 4) для подключения четырех тестируемых приемников. Для предотвращения попадания постоянного напряжения с ВЧ-входов приемников в сплиттер к его выходам подсоединены блокировочные конденсаторы DC blocks (5) — в виде блоков с SMA-разъемами. Со стороны ВЧ-кабелей от приемников (5) обычно используется разъем SMA female.
Все используемые в схеме основные компоненты (кроме SMA адаптеров) имеют потери: Bias Tee — не более 1 дБ; сплиттер — 6–7 дБ, DC block — порядка 0,5–1,0 дБ. То есть суммарно потери могут составить 7–9 дБ. Это необходимо учитывать при выборе усиления антенны и длины кабельного тракта.
К достоинствам данной схемы можно отнести то, что все тестируемые приемники работают одновременно и с одинаковым навигационным сигналом, получаемым со спутников. Очевидным недостатком является то, что сигнал с приемной антенны разветвляется на все тестируемые навигационные приемники, поэтому каждый тестируемый приемник получает сигнал, ослабленный в соответствующее число раз. Это заставляет усомниться в достоверности результатов тестирования, полученных таким образом. Ведь в реальной жизни каждый приемник будет работать только со своей приемной антенной и получать от нее всю энергию сигнала. Соответственно, реальные характеристики каждого приемника будут отличаться от тех, которые получены при помощи тестового макета, изображенного на рис. 3.
На рис. 4 представлена структурная схема другого устройства сравнительного тестирования спутниковых навигационных приемников. Данная схема представляется наиболее предпочтительной для выполнения статического сравнительного тестирования нескольких навигационных приемников.

Рис. 4. Устройство сравнительного тестирования спутниковых навигационных приемников на плоскости:
ПК — персональный компьютер;
БП — блок питания;
ЭА — электрический аккумулятор;
КРП — крепление рабочей поверхности;
A1, A2, A3 — антенны;
П1, П2, П3 — навигационные приемники;
Com — порт ПК
Рабочая поверхность устройства включает в себя металлические крепления для антенн, находящиеся на расстоянии 20 мм друг от друга и 25 мм от края поверхности. Расположение креплений для антенн позволяет утверждать, что антенны поставлены в равные условия эксплуатации. При этом вероятность возникновения помех за счет пересечения боковых лепестков диаграмм направленности антенн сводится к нулю.
Построение и успешное использование данного макета основано на следующих соображениях. Дальномерные коды, используемые в системах GPS и ГЛОНАСС, представляют собой бинарные коды, то есть последовательность из единиц и нулей [14]. Каждому спутнику соответствует своя уникальная последовательность, по которой спутник отождествляется аппаратурой пользователя, даже когда на его антенну одновременно приходят сигналы от нескольких спутников, — известная техника связи множественного доступа с разделением по кодам (CDMA). Точно такие же кодовые последовательности независимо воспроизводятся в приемнике. Посредством совмещения ответной последовательности с принятой последовательностью с помощью коррелятора и, зная момент времени, когда сигнал был передан спутником, можно вычислить время прохождения и, следовательно, дальность r = ct (с — скорость света, t — время прохождения сигнала). Каждый спутник передает два различных кода: C/A (coarse acquisition — «грубое приобретение») и Р (precise — «точный» или protected — «защищенный») коды. Оба кода формируются от генератора 10,23 МГц, C/A-код — с делением частоты на 10, P-код — без изменения частоты. C/A-код является последовательностью из 1023 бинарных цифр или чипов, которые повторяются каждую миллисекунду. Это означает, что чипы генерируются со скоростью 1 023 000 за секунду и каждый имеет продолжительность примерно в 1 мкс. Каждый чип, находясь на несущей волне, проходит через пространство со скоростью света. Поэтому можно преобразовать интервал времени в единицы расстояния, умножив его на эту скорость. Одна микросекунда соответствует примерно 300 м. Это есть длина волны C/A-кода. Считается, что точность измерения расстояния равняется примерно 1% от длины волны, поэтому точность измерения расстояний по C/A-коду равняется примерно 3 м. Реальное значение погрешности оказывается несколько больше, потому что на сигнал со спутника действуют различные помехи. Таким образом, расположив приемные антенны рядом друг с другом в пределах величины погрешности определения местоположения, мы создадим максимально идентичные условия тестирования навигационных приемников. В этих условиях можно считать, что на все приемные антенны будет поступать сигнал со спутника одинаковой мощности. Разность в местоположении всех приемных антенн друг относительно друга заранее известна, поскольку расстояние между ними строго фиксировано. Эта разность может быть далее учтена на этапе обработки путем внесения соответствующих поправок в параметре а0 в формулах (1) и (2).
Как отмечалось ранее, все ГЛОНАСС/GPS-приемники поддерживают выдачу данных по единому протоколу NMEA. Хотя, как показывает практика, состав данного протокола может отличаться в ГЛОНАСС/GPS-приемниках разных производителей. Для того чтобы поставить все тестируемые приемники в максимально идентичные условия, с точки зрения протокола NMEA, была разработана специальная программа для ЭВМ, поддерживающая работу с любыми разновидностями данного протокола, вне зависимости от состава и последовательности выдачи навигационных NMEA-предложений. Типичный внешний вид пользовательского интерфейса данной программы изображен на рис. 5.

Рис. 5. Внешний вид пользовательского интерфейса программы тестирования ГЛОНАСС/GPS-приемников
Данная программа позволяет производить и динамическое тестирование (тестирование в движении или снятие так называемых треков) ГЛОНАСС/GPS-приемника. Для этого необходимо нажать на программную кнопку Map в рабочем окне программы.
Динамическое тестирование
Рассмотрим суть динамического тестирования более подробно. Во многих источниках динамический тест ГЛОНАСС/GPS-приемников представляется как основополагающий, на основе которого делаются выводы о пригодности того или иного приемника для применения в задачах мониторинга подвижных объектов. Теоретически траектория движения транспортного средства представляет собой детерминированную функцию, изменяющуюся в пространстве и во времени. Обычно пространство ограничивается двумя измерениями (траектория отображается на плоскости навигационной карты). Далее большинство авторов тестирования накладывают траекторию, полученную по измерениям навигационного приемника, на ту, которая считается эталонной (например, которая была предварительно нарисована на карте), и анализируют степень расхождения данных двух траекторий. В подавляющем большинстве случаев выполняется визуальный анализ, гораздо реже — с приведением каких-либо численных характеристик. Например, приводятся величины максимального расхождения реальной и теоретической траекторий в неких критических точках (въезд во двор, проезд между высотными домами, проезд под мостом или в подземном туннеле и т. д.). С точки зрения статистического анализа и получения достоверных результатов сравнения такой подход не может быть признан удовлетворительным по ряду причин.
В реальности траектория движения транспортного средства не является полностью детерминированной функцией. Время от времени водитель вынужден изменять траекторию движения, приспосабливаясь к непредсказуемым условиям дорожного движения (перестраивание между полосами, ускорение, торможение и т. д.). То есть сама траектория движения транспортного средства уже является случайной функцией.
При движении ГЛОНАСС/GPS-приемника по некоторой траектории получаем единичную реализацию случайной функции, изменяющуюся в пространстве (на плоскости карты) и во времени. Очевидно, что для полного статистического описания данной случайной функции необходимо иметь в своем распоряжении весь ансамбль реализаций [15] данной функции (полный набор всех возможных траекторий движения). Очевидно, что данный ансамбль реализаций бесконечен.
Случайная функция, получаемая в результате снятия показаний ГЛОНАСС/GPS-приемника в движении, не является стационарной [15]. То есть статистические характеристики (математическое ожидание и дисперсия) зависят от времени и от участка траектории движения в пределах каждой отдельно взятой реализации. Также случайная функция, получаемая в результате снятия показаний ГЛОНАСС/GPS-приемника в движении, не является эргодической [15]. Это значит, что статистические характеристики, вычисленные для отдельно взятой реализации, не будут совпадать со статистическими характеристиками, вычисленными в фиксированный момент времени в фиксированной точке пространства по всему ансамблю реализаций.
Все это свидетельствует о том, что анализ треков перемещения навигационного приемника в том виде, в котором он описывается в СМИ, некорректен. Поведение конкретного навигационного приемника в пределах единично взятой траектории движения транспортного средства не несет в себе информации о точности и достоверности определения местоположения данным приемником.
Можно использовать допущение о том, что при тестировании GPS/ГЛОНАСС-приемника транспортное средство движется строго по детерминированной и заранее известной траектории, не совершая непредсказуемых маневров. Зная точные координаты каждой точки траектории движения, в которой навигационный приемник производил замер своего местоположения, мы можем вычесть эти точные координаты из траектории движения приемника и устранить таким образом пространственную зависимость. После подобной обработки экспериментальных данных можно утверждать, что случайная функция, полученная в результате динамического теста навигационного приемника, приобрела эргодический характер. Она стала стационарной в широком смысле [15], поскольку среднее значение координат перестало зависеть от времени (предполагаем, что среднее значение совпадает с истинным местоположением, что, как правило, выполняется для всех исправных навигационных приемников).
Стационарность в широком смысле позволяет говорить о том, что математическое ожидание и дисперсия, вычисленные по единичной реализации случайной функции, совпадут со значениями, вычисленными в фиксированный момент времени для всего ансамбля реализаций. Таким образом, имея в руках данные о единственной траектории движения навигационного приемника и подвергнув их описанной обработке, можно оценить поведение приемника в динамическом тесте и выполнить сравнение данного приемника с другими.
Можно доказать, что математическое ожидание, вычисленное по описанной выше методике, будет совпадать с математическим ожиданием, вычисленным в ходе статического теста. Среднеквадратическое отклонение, полученное в ходе динамического теста, не будет превышать значение, полученное в ходе статического теста в точке траектории с наихудшими условиями приема. Таким образом, приходим к выводу о том, что трудоемкий динамический тест навигационного приемника может быть заменен статическим тестом в условиях наихудшего приема сигнала, на которые рассчитывается конечное изделие.
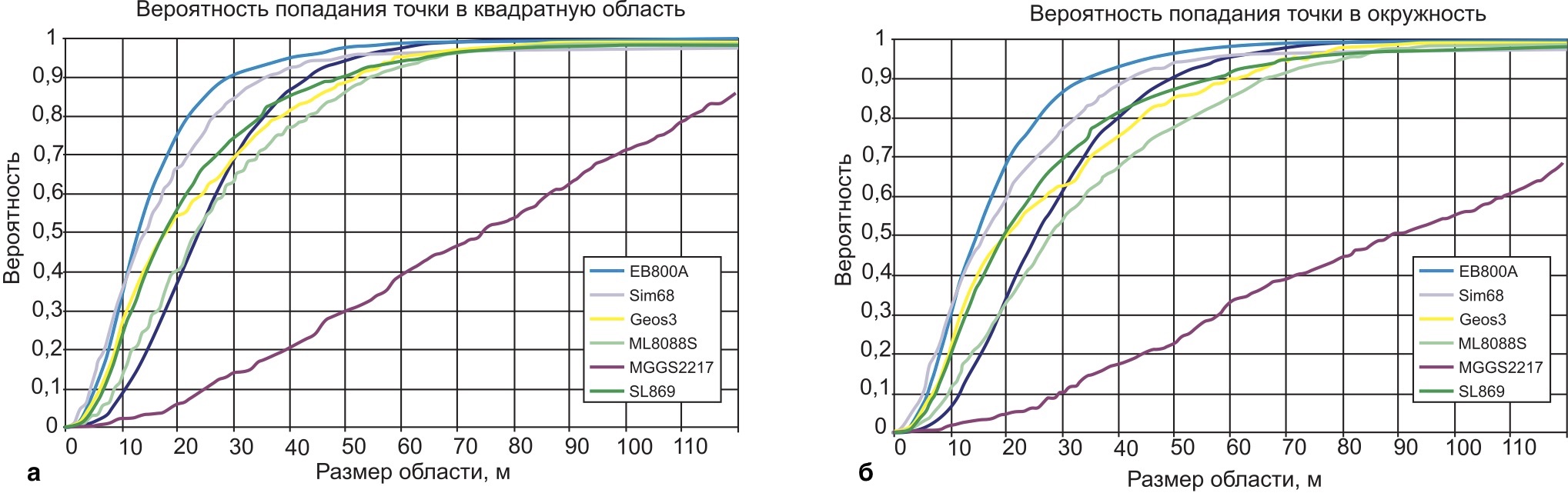
Рис. 6. Вероятность попадания точки в область, ограниченную:
а) квадратом;
б) окружностью
На основании приведенных соображений, с использованием тестового макета, показанного на рис. 5, и специально написанной программы (рис. 6), были получены численные результаты сравнительного тестирования семи основных навигационных ГЛОНАСС/GPS-приемников. Эти результаты сведены в таблицу 2.
|
|
«ГеоС-3» |
EB-800A |
Sim68 |
Sim68R |
MGGS2217 |
ML8088S |
SL869 |
|
Заявленная точность, м |
2,5 |
2,5 |
2 |
2 |
2 |
2 |
2 |
|
Время тестирования, ч |
24 |
24 |
24 |
24 |
24 |
24 |
24 |
|
L, м |
15530 |
15042 |
24403 |
30245 |
77762 |
41781 |
81547 |
|
σx, м |
22 |
15 |
37 |
30 |
44 |
28 |
51 |
|
σy, м |
30 |
28 |
52 |
48 |
55 |
33 |
54 |
|
σ, м |
37 |
32 |
64 |
56 |
70 |
43 |
74 |
Сразу следует оговориться, в каких условиях проводилось сравнительное тестирование. Прямая видимость открытого неба отсутствовала. Все испытуемые приемники находились внутри помещения (на 4-м этаже 7-этажного дома) на расстоянии 5 м от окна, выходящего на северо-запад. Условия можно охарактеризовать как затруднительные для работы спутниковых навигационных приемников. Максимальное зафиксированное отношение сигнал/шум 29 дБ, среднее отношение — 22 дБ.
Поскольку, как было показано ранее, численных характеристик в таблице 2 недостаточно для исчерпывающего описания того или иного приемника, автором данной статьи предлагаются дополнительные статистические характеристики. Строятся эти характеристики следующим образом. На плоскости фиксируется область определенного размера (окружность определенного радиуса или квадрат со стороной определенной длины) с геометрическим центром в точке (–аx, –ay) (рис. 2). Далее оценивается вероятность попадания координат, измеренных навигационным приемником, в данную область. Затем размер области увеличивается с определенным шагом и снова производится оценка вероятности попадания в нее координат, измеренных приемником. В итоге получается семейство кривых, изображенных на рис. 6. Каждая кривая соответствует определенному навигационному приемнику.
По мнению автора статьи, статистические характеристики, изображенные на рис. 6, наиболее исчерпывающе характеризуют поведение навигационных приемников в статическом тесте и позволяют произвести их классификацию по областям применения. Например, чем левее и выше расположена кривая, тем больше вероятность попадания точки с измеренными приемником координатами в область меньшего размера. Тем, соответственно, более точным можно считать испытуемый приемник. Чем раньше кривая на рис. 6 достигает значения вероятности 1, тем меньше вероятность того, что испытуемый приемник выдаст оценку координат с резким и существенным отклонением от истинного местоположения. Тем, соответственно, более стабильными можно считать выдаваемые приемником показания.
Выводы
Результаты, приведенные на рис. 6, могут показаться неожиданными, поскольку их невозможно получить с помощью визуального анализа траектории смещения приемника на рис. 1. Однако эти данные позволяют сделать ряд важных выводов.
Вероятность попадания в квадратную область выше, чем в область, ограниченную окружностью. Это вполне логично, поскольку площадь квадрата на рис. 2 больше, чем площадь круга.
По вероятности попадания в область размером до 55–60 м явным лидером оказывается ГЛОНАСС/GPS-приемник Sim68. Его можно рекомендовать для применения в тех ситуациях, когда необходимо получать максимальную точность определения местоположения с высокой вероятностью. Но данный приемник имеет некоторую ощутимую вероятность выхода показаний за пределы области размером 120 м. Это значит, что изредка возможны существенные «аномальные» отклонения показаний данного приемника.
Все «гнездо», построенное на плоскости x, y для приемника EB-800A, практически полностью укладывается в область размером 120 м (вероятность попадания показаний приемника в данную область практически равна 1). Данный приемник можно рекомендовать для тех ситуаций, когда нужно получить минимальную ошибку из-за случайных флуктуаций показаний приемника, например во время ночной стоянки транспортного средства в пределах некоторого паркинга размером 120 м.
Навигационный приемник Geos-3 оказывается компромиссным решением между Sim68 и EB-800A. Он показывает достаточно высокую вероятность попадания измерений в области небольших размеров (данная вероятность больше, чем у EB-800A) и пренебрежимо низкую вероятность выхода за пределы области размером 120 м (данная вероятность меньше, чем у Sim68).
Приемник NAVIA ML8088S показал неоднозначный результат. В случае квадратной области его характеристики оказываются близки к характеристикам «ГеоС-3». Но в случае круглой области приемник ML8088S показал худший результат среди лидеров теста. Он обладает самой низкой вероятностью попадания в круглую область небольших размеров среди данных приемников, и при радиусе области 120 м вероятность попадания в нее еще не достигает 1.
Приемник MGGS2217 производства MStar показал наихудший результат среди всех протестированных устройств, из чего можно сделать вывод о том, что его аппаратная или программная база является на данный момент достаточно устаревшей.
На основании изложенного материала можно сделать следующие выводы.
Процесс сравнительного тестирования нескольких ГЛОНАСС/GPS-приемников представляется несколько более сложным, чем представлено во многих источниках. Достоверные результаты сравнительного тестирования можно получить, только полагаясь на математические методы статистического анализа. Необходимо анализировать всю совокупность численных показателей качества работы приемника, исходя из требований конкретной практической задачи. Можно привести ряд примеров, когда некоторый отдельно взятый приемник, проигрывая по ряду показателей качества своим конкурентам, существенно выигрывает у них по другим параметрам. И это оказывается решающим фактором в пользу его выбора для применения в проекте.
Чаще всего используемый визуальный анализ треков, полученных с помощью того или иного навигационного приемника, неэффективен. Для каждой практической ситуации можно и нужно разрабатывать собственные математические критерии сравнительного тестирования, основываясь на тех характеристиках навигационных приемников, которые наиболее существенным образом влияют на качество решения поставленной задачи.
В работе приведены рекомендации по построению тестового макета для проведения сравнительного тестирования ГЛОНАСС/GPS-приемников в статическом тесте. Динамический тест навигационных приемников (получение треков при движении), как правило, можно заменить статическим тестом в точке траектории движения с наихудшими условиями приема радиосигнала. Несмотря на неинформативность динамического теста ГЛОНАСС/GPS-приемников с точки зрения получения характеристик точности определения местоположения, нельзя не признать его полезность с точки зрения получения некоторых других параметров, например точности оценивания скорости движения транспортного средства. Кроме того, на практике иногда встречаются ситуации, когда работу ГЛОНАСС/GPS-приемника нельзя проверить иначе, чем с помощью динамического теста. К таким случаям относится проезд через длинные подземные (подводные) туннели, куда не проникают практически никакие информационные радиосигналы. В данных условиях статическое тестирование выполнить невозможно. Критерии оценки и сравнения информационных параметров при динамическом тестировании не рассматривались в данной работе.
 14 января, 2020
14 января, 2020 6 мая, 2015
6 мая, 2015 11 декабря, 2008
11 декабря, 2008