
Точность нахождения объекта при частичном затенении антенны GPS/ГЛОНАСС-приемника
Как указано в [1], определяемая с помощью спутниковых навигационных систем (СНС) точность дается в значении «минимального возможного уровня» — то есть не хуже определенного уровня за определенный промежуток времени. Для любой точки земной поверхности точность в горизонтальной плоскости эквивалентна или лучше чем 100 м, исходя из среднеквадратической ошибки измерения удвоенного расстояния (twice the distance root mean square, 2DRMS). Это значит, что за сутки плановые координаты, определяемые с помощью GPS, будут находиться не далее 100 м от истинных координат в течение 95% процентов времени наблюдений. Соответствующая точность определения высот — 156 м, а времени — 340 нс.

Рис. 1. Внешний вид GPS/ГЛОНАСС-приемника
Эти расчетные параметры точности определены для орбитальной группировки из 24 спутников, при маске возвышения 5° без препятствий и как минимум четырех наблюдаемых спутников с геометрическим фактором потери точности позиционирования (PDOP) не более 6. Это означает, что в зависимости от местоположения или времени суток реальная точность GPS будет меняться. В глубоких каньонах городов мы можем столкнуться с тем, что в поле зрения не будет четырех спутников или PDOP значительно превысит 6.
В исследовании нами использовался экспериментальный GPS/ГЛОНАСС-приемник, созданный на основе интегрального модуля S3535G2F компании SkyTraq (рис. 1, 2).
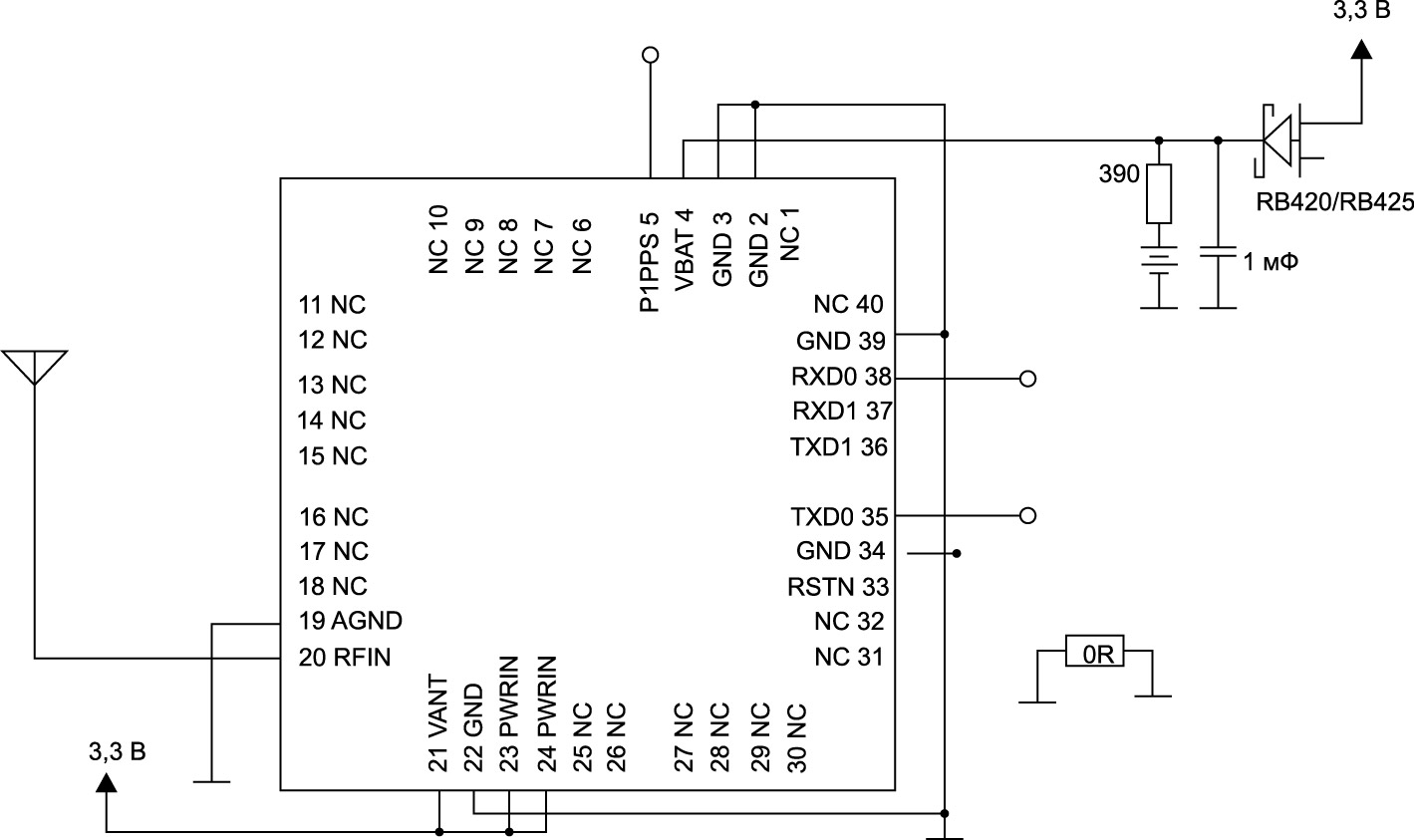
Рис. 2. Принципиальная схема включения интегрального модуля S3535G2F
Кроме навигационного модуля на плате размещены источник питания LT1086-3.3 и драйвер COM-порта ADM3202JRN. Процесс проектирования и настройки приемника подробно описан в [3]. Плата навигационного модуля подключена к внешнему источнику питания, кабелем соединена с COM-портом компьютера, через высокочастотный разъем к ней подключена выносная ГЛОНАСС/GPS-антенна 2J433GFD-500RG174-C20N фирмы 2J (www.2j-antennae.com). Внешний вид антенны показан на рис. 3, основные технические характеристики:
- частотный диапазон GPS — 1575,42 МГц, GLONASS — 1572–1610 МГц;
- коэффициент усиления GPS/GLONASS 35 дБ;
- КСВН< 2:1 для всех диапазонов;
- напряжение питания 3–5 В;
- ток потребления 19 мA;
- размеры 38×34×13,7 мм;
- диапазон рабочих температур –40…+85 °C.

Рис. 3. Внешний вид антенны 2J433GFD-500RG174-C20N
Антенна была скотчем закреплена на внутренней стороне направленного на юго-запад окна лаборатории (рис. 4), находящейся на первом (цокольном) этаже 4-этажного здания.

Рис. 4. Закрепленная на окне ГЛОНАСС/GPS-антенна
Большая часть окна заслонена стоящим в непосредственной близости (примерно 1 м) металлическим ангаром (рис. 5), на окне установлена металлическая решетка. Таким образом, область видимого антенной свободного пространства в азимутальной плоскости составляет примерно 70°.

Рис. 5. Окно, за которым находится GPS/ГЛОНАСС-приемник (за решеткой)
Измерения координат производились на протяжении нескольких дней с различными временными промежутками — от 15 до 60 минут. Результаты измерений сведены в таблицу. Обработка и визуализация сообщений GPS/ГЛОНАСС-приемника выполнялись в программе GeoSDemo КБ «ГеоСтар навигация». Этот инструмент удобен тем, что позволяет отображать местоположение абонента на картах Google (рис. 6).

Рис. 6. Окно программы GeoSDemo с указанием объекта на карте Google.
|
№ |
Местное время |
Номера спутников GPS в решении |
Номера спутников ГЛОНАСС |
HDOP |
VDOP |
Скорость, м/с |
Высота, м |
|
29.05.12 |
|||||||
|
1 |
20:15 |
12 |
9, 8 |
2,3 |
0,9 |
0 |
0,1 |
|
2 |
20:30 |
9, 12 |
9, 8 |
3,9 |
0,9 |
0,463 |
296,7 |
|
3 |
20:45 |
12, 14 |
9, 10 |
4,2 |
1,0 |
0 |
299,1 |
|
4* |
21:00 |
27, 12, 14 |
9, 10 |
4,2 |
1,0 |
0 |
361,3 |
|
5* |
21:15 |
9,12,14, 27 |
16 |
7,6 |
1,0 |
0* |
208,4 |
|
30.05.12 |
|||||||
|
6 |
12:45 |
13, 10, 2, 4 |
4, 5 |
7,6 |
5,1 |
0 |
337,2 |
|
7 |
18:00 |
15, 27, 19, 18 |
9 |
3,3 |
1,0 |
0 |
310,9 |
|
8 |
18:15 |
15, 27, 19, 9, 18 |
9 |
4,3 |
3,7 |
0 |
276,8 |
|
9 |
18:18 |
15, 27, 19, 9, 18 |
9 |
3,0 |
1,0 |
0,566 |
277,8 |
|
10 |
18:30 |
15, 27, 11, 9 |
9,8 |
2,9 |
3,3 |
0 |
264,7 |
|
11 |
18:47 |
27, 15, 11, 9 |
9, 8, 10 |
2,7 |
2,4 |
0 |
247,6 |
|
12 |
19:01 |
27, 1, 15, 11, 9 |
9, 8, 10 |
2,3 |
2,3 |
0 |
285,2 |
|
13 |
19:17 |
27, 9, 1, 15, 11 |
8, 10 |
1,9 |
2,4 |
0 |
292,2 |
|
14 |
19:30 |
27, 9, 15, 11 |
10 |
1,9 |
1,9 |
0 |
305,2 |
|
15 |
19:45 |
27, 9, 11 |
10 |
2,6 |
1,0 |
0 |
318,9 |
|
16 |
20:30 |
9, 12, 14 |
10 |
2,3 |
0,9 |
0 |
208,4 |
|
17 |
20:45 |
12, 14, 1 |
10, 11 |
3,9 |
1,0 |
0 |
231,9 |
|
18 |
21:06 |
9, 12, 27, 14 |
11 |
2,7 |
1,0 |
0,514 |
231,1 |
|
31.05.12 |
|||||||
|
19 |
10:00 |
20, 25, 23, 17 |
4, 19 |
2,0 |
0,9 |
0 |
204,5 |
|
2.06.12 |
|||||||
|
20 |
10:07 |
20, 17 |
6 |
5,3 |
0,8 |
0,926 |
1,1 |
|
21 |
10:27 |
4 |
6, 22 |
6,2 |
1,0 |
3,447 |
0,1 |
|
22 |
11:02 |
20, 23, 4 |
6, 7, 22 |
5,3 |
4,6 |
0 |
0,1 |
|
23 |
11:26 |
23, 13, 4, 10 |
7 |
14,7 |
1,0 |
0,772 |
368,1 |
|
24 |
12:18 |
13, 10, 4, 2 |
— |
5,0 |
1,0 |
0 |
305,1 |
|
25 |
12:34 |
13, 10, 20, 4, 2 |
7, 8 |
2,2 |
1,6 |
0 |
318,6 |
|
26 |
12:52 |
13, 10, 2 |
8 |
4,7 |
1,0 |
0 |
287,2 |
|
27 |
13:15 |
10, 2 |
8 |
3,5 |
1,0 |
0 |
307,4 |
|
28 |
13:52 |
— |
8 |
— |
— |
0 |
71,4 |
|
29 |
14:24 |
7, 8, 5 |
1 |
3,9 |
3,6 |
0 |
273,5 |
|
30 |
15:30 |
8, 3, 5, 26 |
10, 1 |
3,0 |
3,5 |
0 |
265,3 |
|
31 |
15:52 |
8, 26, 3, 5 |
1, 11 |
2,7 |
2,5 |
0 |
281,7 |
|
32 |
16:16 |
26, 3, 5 |
1 |
2,6 |
1,0 |
0,463 |
267,9 |
|
4.06.12 |
|||||||
|
33* |
09:23 |
20, 17 |
23 |
6,1 |
1,0 |
1,389 |
42,1 |
|
34* |
09:42 |
20, 17 |
8, 23 |
6,5 |
1,0 |
0 |
107,9 |
|
35 |
10:15 |
20, 23, 25, 4 |
8 |
2,3 |
2,7 |
0 |
237,4 |
|
36 |
10:45 |
20, 23, 4 |
24 |
2,8 |
1,0 |
0 |
230,0 |
|
37 |
11:18 |
23, 4, 10 |
1 |
11,1 |
1,0 |
0 |
328,7 |
|
38 |
14:38 |
8, 5, 16 |
— |
2,3 |
0,9 |
0 |
321,4 |
|
39 |
15:13 |
8, 5, 26, 16 |
— |
2,5 |
1,0 |
0 |
302,6 |
|
40 |
15:41 |
8, 26, 5 |
— |
2,9 |
0,8 |
0 |
392,9 |
Результаты графической обработки табличных данных показаны на рис. 7. Красной точкой отмечено реальное положение объекта, зелеными — показания приемника. На карте видно, что большинство результатов попадает в окружность радиусом не более 200 м, с центром в точке истинного местонахождения. Случаи бóльшего удаления отмечены в таблице «звездочкой».

Рис. 7. Отметки местоположения всех измерений
Замер № 21 не виден на рис. 7 по причине слишком большой погрешности измерения — более 2 км (рис. 8).

Рис. 8. Наихудшая ситуация настоящего исследования — номер 21 в таблице
Замер № 28 не вызывает вопросов: в видимости находится только один спутник ГЛОНАСС. В остальных случаях доступны сигналы не менее трех спутников, среднее значение HDOP — 5,88, VDOP — 1,48. В экспериментах №№ 6, 23 и 37 HDOP показывает худшие значения — 7,6; 14,7 и 11,1 соответственно, тем не менее точность показаний в данных случаях выше. Особого внимания заслуживает № 22, когда в видимости находятся шесть спутников — три GPS и три ГЛОНАСС, но их геометрическое сочетание настолько неудачно (HDOP 5,3, VDOP 4,6), что приводит к неудовлетворительному результату. Среднее значение HDOP по всем измерениям составляет 4,13, VDOP — 1,65.
Выводы
В случае частичного затенения антенны GPS/ГЛОНАСС-приемника показаний трех спутников обеих навигационных систем достаточно для формирования удовлетворительного (не хуже 200 м) решения по точности местоположения абонента с вероятностью 80%. Более существенную роль для точности определения местоположения играют геометрические факторы расположения — HDOP и VDOP; количество спутников (если их три и более) особого значения в данном случае не имеет.
- Richard B. Langley. Dilution of Precision // University of New Brunswick. GPS World. May, 1999.
- S3535G2F High-Performance 88 Channel GLONASS/GPS Receiver.
- Малыгин И., Созонов Е. Исследование отечественных GPS/ГЛОНАСС-приемников // Беспроводные технологии. 2011. № 3.
- ГЛОНАСС. Принципы построения и функционирования / Под ред. А. И. Перова, В. Н. Харисова. Изд. 4-е, перераб. и доп. М.: Радиотехника. 2010.
 27 мая, 2020
27 мая, 2020 11 декабря, 2008
11 декабря, 2008 25 марта, 2019
25 марта, 2019