
Система коммуникации малого радиуса действия с подвижными объектами
Введение
В настоящее время наблюдается бурное развитие рынка беспилотных летательных аппаратов (БПЛА) военного и гражданского назначения, а также широкое внедрение автономных транспортных роботов во внутризаводские операции. В системах с БПЛА одними из основных тенденций современного развития являются уменьшение размеров аппаратов и применение аппаратов в составе групп (роев). Последняя тенденция предполагает оснащение БПЛА помехозащищенными и устойчивыми к подавлению на физическом уровне коммуникационными каналами внутри группы, а также их электромагнитную совместимость (ЭМС) с иным оборудованием, применяемым в системах с БПЛА.
Жесткие требования по помехозащищенности и по ЭМС накладываются и на коммуникационные системы автономных транспортных роботов, нередко эксплуатирующихся в условиях сильных помех, создаваемых цеховым промышленным оборудованием.
Сегодня разные производители транспортных роботов используют различные коммуникационные протоколы. Автором данной статьи был проведен поиск конкретных требований к коммуникационным системам транспортных роботов в нормативных документах (ГОСТ 28336-89 «Системы производственные гибкие. Робокары. Основные параметры», ГОСТ 28337-89 «Системы производственные гибкие. Робокары. Нормы надежности и методы их контроля» и др.), который, к сожалению, не дал результатов.
Для осуществления низкоскоростной, до 10 кбит/с, коммуникации между подвижными объектами, находящимися в радиусе 20–50 м, предлагается использовать модулированную магнитную составляющую электромагнитной волны в ближней области. Этим достигается высокая помехозащищенность модулированного магнитного потока к индустриальным электромагнитным помехам благодаря пространственной локализации магнитного поля в области нахождения объектов и преобладанию магнитной компоненты поля в сигнале несущей над электрической.
В данной статье акцент будет сделан на выбор и обоснование протокола физического уровня для реализации помехозащищенной коммуникационной системы малого радиуса действия.
Физические основы метода
Характер электромагнитного поля диполя в той или иной точке пространства в значительной степени зависит от того, близко или далеко от него расположена рассматриваемая точка. В электродинамике и в теории антенн имеются соответствующие понятия — «ближнее» и «дальнее» поле. В основе этих оценок лежат соотношения между расстоянием от антенны до точки, в которой осуществляется прием сигнала.
Как показано в работе [1], свойства поля вблизи источника определяются в основном характеристиками источника. Вдали от источника свойства поля зависят, главным образом, от среды, в которой распространяется поле. Поэтому пространство, окружающее источник, можно условно разделить на две области — ближнюю и дальнюю; рядом с источником расположено ближнее, или индуктивное, поле. На расстоянии, превышающем ~l/2p длины волны, располагается дальнее поле, или поле излучения. Область на расстоянии l/2p является переходной между ближним и дальним полем.
Отношение напряженности электрического поля Е к напряженности магнитного поля Н представляет собой полное волновое сопротивление ZW. В дальнем поле это отношение равно полному характеристическому сопротивлению среды ZO. Например, для воздушного или свободного пространства (вакуума) ZO = ZW = 377 Ом. В ближнем поле величина этого отношения определяется параметрами источника и расстоянием от него до рассматриваемой точки. Если в источнике генерируются большой ток и низкое напряжение, Е/Н < 377 Ом, ближнее поле является в основном магнитным. В другом случае, если в источнике циркулирует малый ток и высокое напряжение, Е/Н > 377 Ом, то в ближнем поле преобладает электрическая составляющая.
Для антенны в виде штыря или натянутого провода волновое сопротивление вблизи антенны велико, и преобладающим является электрическое поле. По мере увеличения расстояния от источника r напряженность электрического поля падает, так как оно создает дополняющее его магнитное поле. В ближнем поле электрическая составляющая E затухает пропорционально (1/r)3, в то время как магнитная составляющая H затухает пропорционально (1/r)2.
Компоненты E и H, обратно пропорциональные 3-й и 2-й степени расстояния от источника излучения r, доминируют при малых расстояниях между источником поля — диполем и точкой, где считается напряженность полей. Но с ростом расстояния — в дальнем поле — эти компоненты быстро спадают, и остаются только слагаемые, обратно пропорциональные r [1].
Исходя из следующих факторов: более плавный закон затухания магнитной составляющей H, чем электрической E, независимость полевой магнитной связи от свойств окружающей среды (температура, влажность, химический состав), малое затухание магнитного поля при распространении через элементы строительных конструкций — в системе связи малого радиуса действия целесообразно использовать магнитное поле в качестве физического сигнала-переносчика.
Соотношение для напряженности магнитного поля H в направлении, перпендикулярном оси излучающего диполя, имеет следующий вид [1]:
H = k × l × Im × [(1/k × r) × cos(w × t – k × r) – sin(w × t – k × r)]/4 × p × r, (1)
где k = 2× p/l — волновое число, l — длина волны переменного поля H; l — размер диполя, м; Im — амплитуда тока диполя, А; w = 2pfc, fc — несущая частота сигнала.
Исходя из массогабаритных оценок характеристик предлагаемой коммуникационной системы с учетом специфики размеров объектов (БПЛА, робокары) в качестве передающей антенны целесообразно использовать штыревую конструкцию длиной 300–500 мм, а в качестве приемной — плоскую катушку диаметром 500 мм. С учетом поляризации вектора H, оси передающей Z и приемной антенны Y должны быть взаимно ортогональны (рис. 1).

Рис. 1. Передающая антенна — штырь, приемная — катушка
На коротких расстояниях (до 10 м) возможно использование плоских катушек в качестве и передающей и приемной.
При анализе различных физических протоколов беспроводной связи малого радиуса действия было решено использовать в качестве прототипа технологию UWB (Ultra-Wide Band, IEEE 802.15.3a) — технологию сверхширокополосной связи. В классическом варианте для связи применяется самый широкий из распространенных сегодня диапазон частот: 3–10 ГГц (речь идет о диапазоне частот, выделенном под UWB в США, в России эти значения могут быть иными). Сверхширокополосность достигается за счет использования негармонической несущей, представляющей собой короткоимпульсную последовательность высокой скважности. Длительность импульса обычно варьируется в диапазоне 0,1–20 нс, а информация кодируется посредством временной позиционно-импульсной модуляции. Смещение импульса относительно его «штатного» положения в последовательности вперед задает 0, назад — 1. Один информационный бит кодируется последовательностью нескольких импульсов, например 10–100 импульсов/бит. Импульсную систему передачи информации можно рассматривать как предельный случай CDMA, в котором полностью отказались от несущей или, что физически эквивалентно, длительность выходного импульса сделали равной одному периоду несущей.
Вместе с тем внедрение UWB-технологии в данном формате тормозится, поскольку пропускная способность резко падает с увеличением расстояния — гораздо быстрее, чем у узкополосных стандартов беспроводных сетей, например 802.11a/g, обеспечивающих пропускную способность до 54 Мбит/с на дистанции до 100 м — UWB на дистанции до 10 м 110 Мбит/с, на расстоянии 100 м — уже 10–15 Мбит/с. Это связано с тем, что дисперсия электромагнитного излучения в воздухе приводит к значительным искажениям сверхширокополосного сигнала по сравнению с узкополосным. Искажение накапливается с расстоянием и, в конце концов, приводит к тому, что сигнал на входе приемника претерпевает значительные искажения.
Тем не менее для данной задачи идея, заложенная в UWB, может быть успешно реализована в более низкочастотном диапазоне.
Импульс тока — моноцикл Гаусса (рис. 2) — описывается первой производной от функции распределения Гаусса:
I(t) = Im × (2e)–0,5 × (t/t) × exp(–(t/t)2, (2)
где Im — амплитуда импульса тока; t — временная константа, характеризующая затухание (длительность импульса — 2pt).

Рис. 2. Моноцикл Гаусса
Как видно из представленного рисунка, моноцикл Гаусса представляет собой знакопеременный импульс с передним и задним фронтом малой длительности и отсутствием постоянной составляющей. Последовательность токовых импульсов-моноциклов представляется особенно перспективной для использования в системах передачи информации на основе магнитной индукции.
Спектральная плотность сигнала определяется соотношением[2]:
V(ω) = Im × ω × t2 × (2pe)0,5 × t × exp(–(ω × t)2/2). (3)
Центральная частота такого сигнала fc = 1/2pt. По уровню 3 дБ полоса сигнала ограничена частотами f1 = 0,319fc и f2 = 1,922fc. Таким образом, ширина полосы сигнала в диапазоне 3 дБ составляет около 160% от центральной частоты. Для импульса длительностью 300 нс центральная частота 3,3 МГц и ширина полосы около 5,3 МГц.
В указанном частотном диапазоне размер ближней области магнитного поля составляет примерно 50 м.
Приемное устройство функционально представляет собой приемник (детектор) прямого преобразования и коррелятор. Будучи синхронизированным с передатчиком, коррелятор определяет отклонения принятых импульсов, формируя на выходе отклик +1, если сигнал, например, пришел на 2 мкс раньше середины интервала бита, –1, если позже на 2 мкс, и 0 — в остальных случаях.
Оценить помехозащищенность импульсной системы передачи информации можно, используя понятие усиления обработки. В системах с расширением спектра усиление обработки определяется как отношение ширины полосы канала к ширине полосы информационного сигнала. Так, для систем расширения спектра методом прямой последовательности с шириной канала 5 МГц и информационным сигналом 10 кГц усиление составит 500 раз (27 дБ), как и в данном случае.
Одно из существенных достоинств импульсной магнитной системы передачи информации — отсутствие отражений сигналов от различных объектов. Кроме того, благодаря широкополосности затухание импульсного сигнала в различных средах достаточно мало — короткие импульсы легко проходят сквозь различные препятствия, поскольку подавление сигнала происходит не во всем диапазоне.
Из-за высокого усиления обработки импульсная система передачи информации может функционировать с малой средней мощностью передатчика.
Квазистационарность ближнего магнитного поля положительно сказывается на электромагнитной совместимости с другими устройствами, поскольку поле локализовано в пространственной области и слабо влияет на объекты, находящиеся вне этой области.
Оценка энергетических характеристик канала
Для оценки энергетического бюджета канала в ближнем поле воспользуемся уравнением Фрииса [3]:
Pr = PO + Pp + G1 + G2 – 40 × log(4pd/ l) – Pz, (4)
где Pr — мощность принимаемого сигнала, дБ; PO — мощность передаваемого сигнала, дБ; Pp — усиление обработки, дБ; Pz — мощность иных потерь (рассеяние, неортогональность антенн и т. д.), дБ; d — расстояние между точкой приема и передатчиком, м.
G1, G2 — коэффициенты усиления передающей и приемной антенн соответственно. Для плоской катушки и штыря G = 0 дБ.
Для мощности передатчика в импульсе 10 Вт (PO = 10 дБ), Pp = 27дБ и Pz = 20 дБ построим график зависимости принимаемой мощности Pr от расстояния d.
На графике (рис. 3) кривая синего цвета отражает теоретическую зависимость, рассчитанную на основе уравнения (4). Кривая оранжевого цвета показывает экспериментально полученную характеристику принимаемой мощности от расстояния до передатчика.

Рис. 3. График зависимости принимаемой мощности от дистанции связи
При проведении измерений антенной передатчика служил металлический штырь длиной 400 мм, а прием осуществлялся на плоскую катушку диаметром 500 мм, содержащую 30 витков провода.
Отклонение экспериментальной характеристики от расчетной на 4–5 дБ объясняется, вероятно, неоптимальным согласованием выходного каскада передатчика и рассеянием магнитного потока на металлических предметах в помещении (металлический шкаф, стол с металлической плитой).
Из представленных графиков следует, что чувствительность приемника, расположенного в области ближнего поля, в радиусе до 50 м, должна составлять порядка –30 дБ, что эквивалентно 7 мВ в полосе частот 5,3 МГц.
С использованием современной элементной базы не вызывает серьезных технических трудностей создание приемного тракта с чувствительностью Ps = –35 дБ (4 мВ) в данной полосе частот. Таким образом, можно получить запас по чувствительности в 5 дБ.
Энергетический бюджет канала связи, определяемый как разность PO + Pp и Ps, составит 72 дБ.
При использовании при передаче цифровых пакетов позиционно-импульсной модуляции с учетом выбранной мощности передатчика 10 Вт, длительности импульса несущей 300 нс и скорости передачи 9,6 кбит/с средняя мощность при передаче пакета составит ~30 мВт.
Алгоритм работы системы коммуникации
Система связи малого радиуса действия с подвижными объектами предполагает наличие в сети относительно небольшого количества узлов, не более 20. Топологию сети для данного типа системы целесообразно выбрать point-to-point с опцией широковещательного режима.
Протокол обмена на канальном уровне между устройствами может быть следующим:
- битовый интервал разбивается на временные слоты с защитными интервалами между ними;
- при передаче информации каждый узел (устройство) передает состояние очередного бита в своем временном слоте;
- при кодировании бита внутри слота используется позиционно-импульсная модуляция положения короткого импульса на временной оси относительно середины интервала временного слота. Фрагмент кадра передачи показан на рис. 4.

Рис. 4. Структура кадра передачи
На рисунке синим цветом отмечены импульсы, красным цветом обозначены опорные временные метки, относительно которых вычисляется местоположение импульса.
Информация между устройствами должна передаваться короткими (10–20 байт) пакетами.
Каждый пакет должен содержать слово синхронизации (2 байт) для обеспечения работы коррелятора приемника, адрес источника (1 байт), информационные байты, CRC-сумму (2 байт).
Аппаратная реализация устройства
Функциональная схема устройства показана на рис. 5.
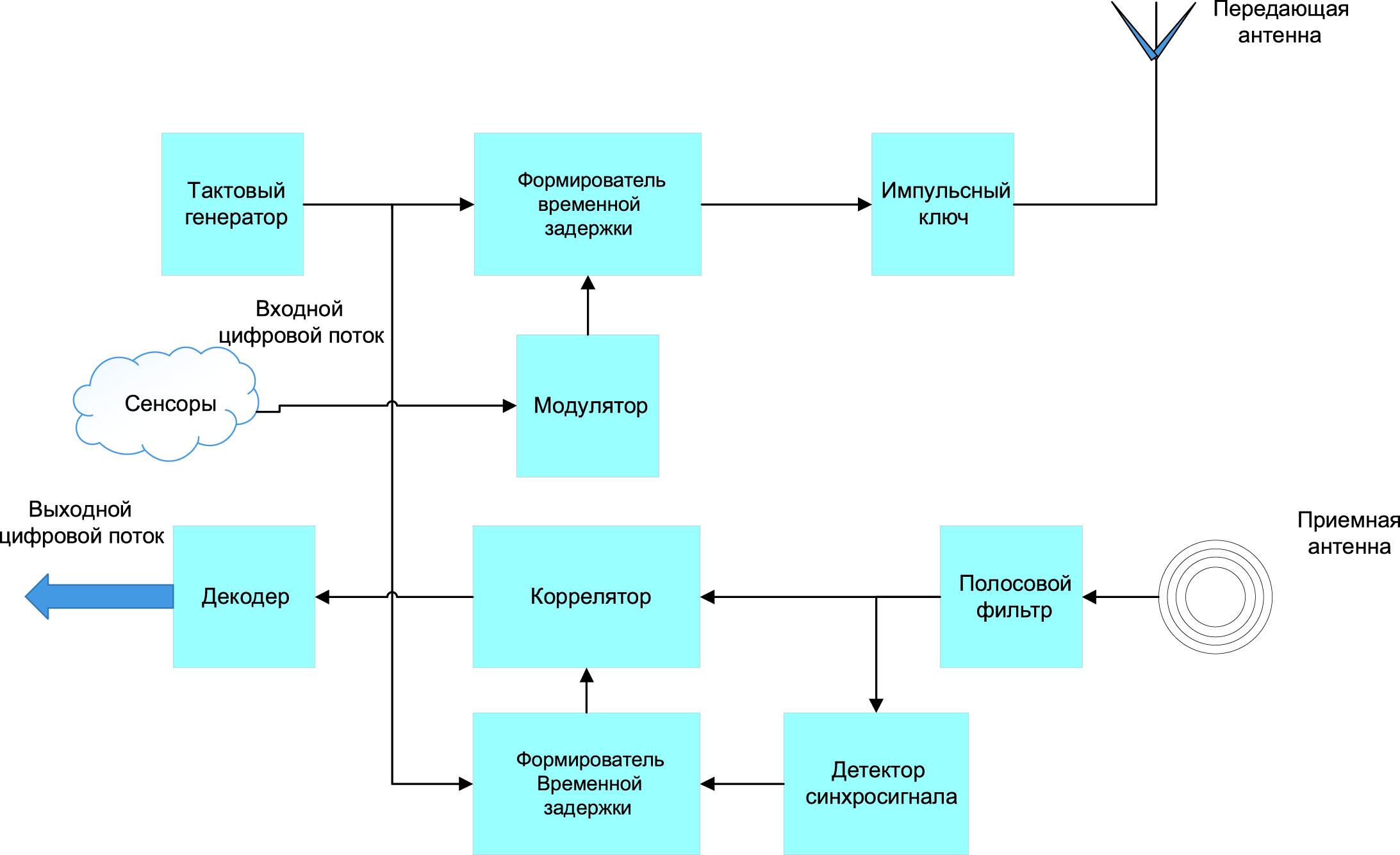
Рис. 5. Функциональная схема устройства
На приведенной схеме в передающем модуле исходный цифровой поток поступает на модулятор, который управляет формирователем временной задержки, создающим соответствующий временной слот. Вместе они образуют позиционно-импульсный модулятор, описанный выше. Сформированная импульсная несущая поступает в импульсный ключ-формирователь, в котором организуются токовые сигналы, имеющие форму моноциклов Гаусса.
Сформированные сигналы излучаются передающей антенной.
В приемном модуле принимаемый с антенны сигнал фильтруется в полосовом фильтре 2-го порядка в полосе ∆F = f2 – f1 и поступает на один из входов коррелятора. На другой вход коррелятора поступает импульсный опорный сигнал с формирователя временной задержки, который запускается при получении синхросигнала. В корреляторе определяется величина и знак временной задержки относительно временных меток, задаваемых опорным сигналом. Из полученных величин декодер формирует выходной цифровой поток. Приемный и передающий модуль управляются общим тактовым генератором.
С целью минимизации энергопотребления все узлы устройства, кроме обнаружителя синхросигнала, в обычном режиме находятся в состоянии сна. В режиме передачи информации активируется только передающий модуль устройства, и после передачи пакета он снова дезактивируется.
В режиме приема информации от других устройств сети при обнаружении синхросигнала активируются только формирователь временной задержки, коррелятор и декодер битовой последовательности.
Синхронизацию работы всех схем устройства осуществляет процессорное ядро (на схеме не показано), к которому через различные интерфейсы могут быть подключены сенсоры и исполнительные устройства.
Электропитание устройства может осуществляться от автономного источника с выходным напряжением не менее 5 В. Для питания выходного импульсного ключа применяется повышающий DC/DC-преобразователь с выходным напряжением 15–20 В, развивающий среднюю мощность не менее 1 Вт.
В качестве автономного источника электропитания для устройств системы связи, размещенных на БПЛА, целесообразно выбрать литий-тионилхлоридные (LiSOCl2) батареи [4].
Литий-тионилхлоридные батареи — это оптимальный источник питания для устройств с небольшим токопотреблением, но с продолжительным сроком автономной работы. Базовые модели этих источников питания обычно имеют небольшой максимальный ток разряда (порядка 0,02 С), при этом отличаются крайне малым значением саморазряда (менее 1–2% в год) и большими значениями удельной энергоемкости.
Для приемопередатчиков коммуникационной системы, предназначенной для робокаров, можно использовать ресурсы штатных источников питания роботов.
Как следует из представленной схемы, она достаточно проста функционально и может быть реализована на базе современных быстродействующих DSP-процессоров в интегральном исполнении.
Короткоимпульсный силовой ключ-формирователь может быть выполнен на основе дрейфовых диодов или транзисторов с резким восстановлением заряда (ДДРВ и ДТРВ). При смене полярности тока они обладают сверхмалым временем восстановления, менее 1 нс, при этом скорость изменения напряжения достигает 2×1012 В/с.
ДДРВ и ДТРВ могут коммутировать большие токи до 100 А за короткие интервалы времени — единицы нс, что особенно важно при формировании переменного магнитного потока.
Полупроводниковые приборы с резким восстановлением заряда впервые в мире были разработаны в начале 1980-x годов в Санкт-Петербургском ФТИ им. А. Ф. Иоффе группой ученых под руководством доктора технических наук А. Ф. Кардо-Сысоева. В настоящее время эти приборы широко применяются в радиолокационной технике. Также они доступны и в обычном, промышленном, исполнении по невысокой цене, порядка 100 руб., сравнимой со стоимостью современных MOSFET-транзисторов.
Выводы
Как показали теоретические оценки и экспериментальная проверка, идея использовать в коммуникационной системе с подвижными объектами технологию ближнего магнитного поля и метод короткоимпульсной несущей вполне жизнеспособна.
Дальнейшие исследования будут направлены на оптимизацию передающих и приемных антенн, устройств согласования с ними, поиск методов локальной концентрации магнитного поля, разработку оптимальной схемотехники приемопередающих узлов с учетом режимов микропотребления.
Должно быть проведено полномасштабное макетирование приемопередающих устройств и их тестирование в различных вариантах применения.
- Фейнман Р., Лейтон Р., Сэндс М. Фейнмановские лекции по физике. Выпуск 3. Пер. с англ. Изд. 4-е. М.: УУРС, 2004.
- Шахнович И. Сверхширокополосная связь. Второе рождение? // Электроника: Наука, технология, бизнес. 2001. № 4.
- Калачев А. Беспроводные приложения: план действий, компоненты Texas Instruments — и вперед! // Новости электроники. 2011. №4.
- Немного магии: применение литиевых батареек в автоматизированных системах учета энергоресурсов.
 18 апреля, 2022
18 апреля, 2022 14 июля, 2009
14 июля, 2009 25 декабря, 2008
25 декабря, 2008