
Новые горизонты микролокации: Bluetooth 5.1, UWB и Wi-Fi 802.11az
Использование беспроводных технологий для позиционирования не новость. Однако с появлением новых вариантов применения, основанных на местоположении, требуемый уровень точности постоянно меняется [1].
Например, в зависимости от качества сигнала система GPS может определить позиционирование с точностью примерно до 5–20 м. Этого вполне достаточно, когда вы отправляетесь на поиски конкретного здания, но уровень точности GPS может оказаться неудовлетворительным, если нужно найти, скажем, определенную полку в магазине или картину во время музейной экскурсии.
Определение местоположения в помещении на уровне, достаточном для таких приложений, как обнаружение близости объекта или человека в пределах нескольких метров (эта технология получила название Micro-Location — «микролокация»), могут обеспечивать современные системы позиционирования, основанные на уровне мощности принимаемых сигналов Bluetooth и Wi-Fi. Тем не менее следующее поколение технологий нацелено на достижение еще большей точности, на уровне от одного метра до нескольких сантиметров. Она открывает новое поколение вариантов использования, которые позволяют пользователям очень точно взаимодействовать с различными участниками в среде, от управления доступом без помощи рук до отслеживания активов и многого другого.
Системы, основанные на спецификациях Bluetooth 5.1 на базе стандарта IEEE 802.15.4z для сетей сверхширокополосной связи — UWB и Wi-Fi Next Generation Positioning согласно стандарту IEEE 802.11az, открывают возможности для приложений точного позиционирования следующего поколения в рамках технологии Micro-Location (рис. 1). UWB (Ultra-Wide Band — сверхширокая полоса) — это беспроводная технология связи на малых расстояниях при низких затратах энергии, использующая в качестве несущей сверхширокополосные сигналы с крайне низкой спектральной плотностью мощности [2].
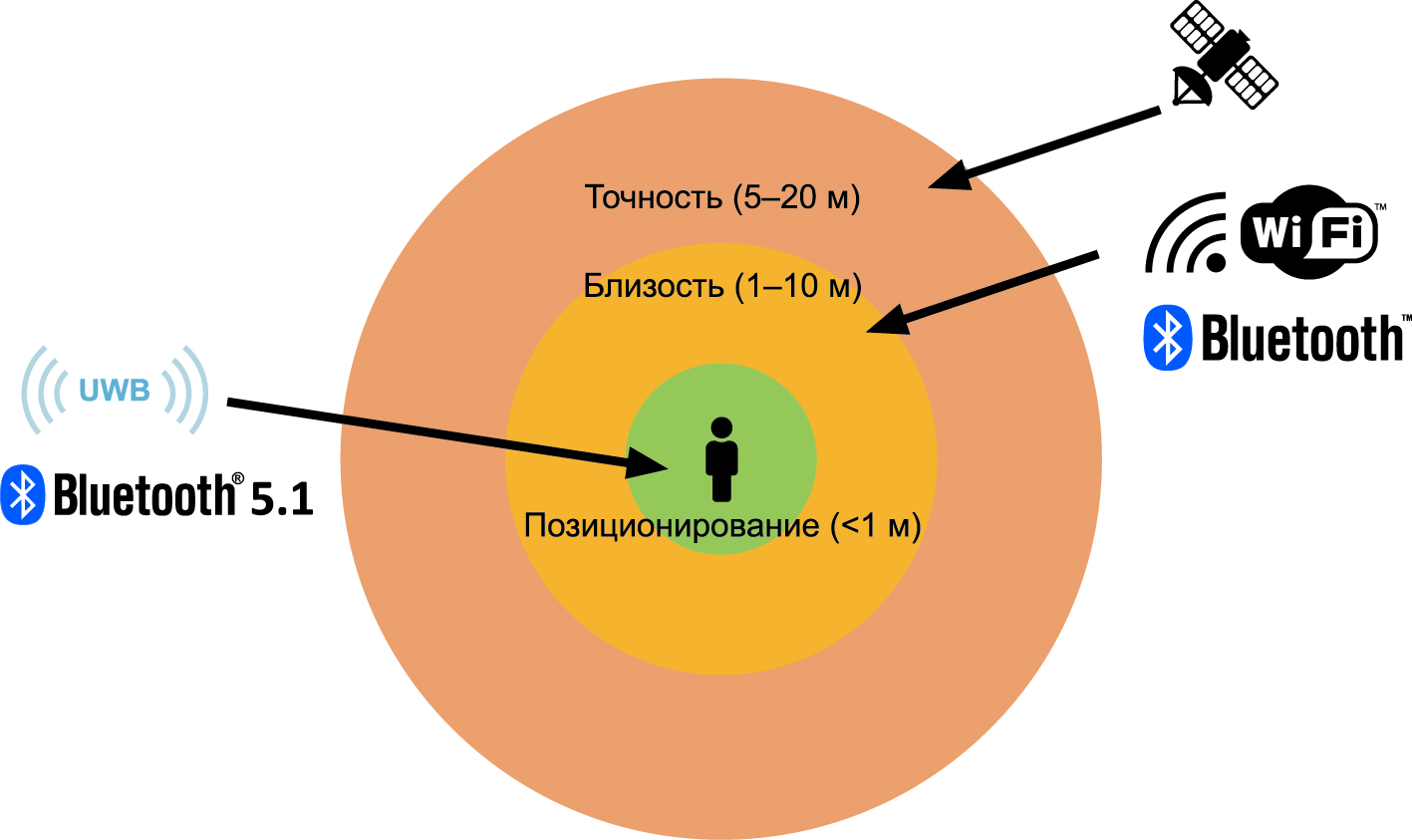
Рис. 1. Использование Bluetooth благодаря поддержке сверхширокополосной связи позволило перейти от низкой точности позиционирования до определения расположения объекта с разрешением менее одного метра
Микролокация через Bluetooth 5.1
Выпущенная в 2019 году Bluetooth Special Interest Group (SIG) спецификация Bluetooth 5.1 обновила основные характеристики Bluetooth, включая улучшения для определения направления. От предыдущих версий Bluetooth 5.1 отличается тем, что теперь у пользователей есть возможность определять местоположение и направление с максимальной точностью. До выпуска этого релиза Bluetooth [3] уже широко использовался в развертываниях для отслеживания местоположения внутри помещений с помощью технологии на основе показателя уровня принимаемого сигнала (Received signal strength indication, RSSI). Суть его в оценке расстояния между передатчиком и приемником посредством измерения затухания сигнала на пути его следования.
Однако приемник может обнаружить лишь то, что передатчик находится в круговой зоне, и не имеет информации о направлении входящего сигнала. Спецификации Bluetooth 5.1 добавляют направленность входящему сигналу, предоставляя информацию об угле обзора. Системы для отслеживания активов или приложений для поиска пути могут быть реализованы с использованием методов Bluetooth 5.1 с углом прихода (возврата) радиоволны (angle of arrival, AoA) или углом выхода (излучения) радиоволны (angle of departure, AoD), как это представлено на рис. 2.

Рис. 2. Пеленгация Bluetooth выполняется путем определения угла прихода радиоволны от устройства Bluetooth
Направление зависит от угла входящего сигнала. Для пеленгации устройства Bluetooth 5.1 передают пакеты, к которым добавляется сигнал с дополнительным полем Constant Tone Extension (CTE). Поле CTE представляет собой битовую последовательность немодулированных единиц с переменной длительностью, которая упрощает вычисление фазы на приемнике. Приемники Bluetooth 5.1 используют антенную решетку как минимум с двумя антеннами и вычисляют угол падения радиоволны на основе разности фаз между антеннами, длины волны сигнала и расстояния между антеннами.
В сочетании с измерением RSSI информация об угле позволяет устройствам определять свое местоположение с большей точностью, чем только по методу RSSI.
Однако точность систем на основе Bluetooth 5.1 зависит от множества факторов, включая количество антенн в решетке и диаграмму направленности антенны, а также от алгоритма постобработки для определения угла по информации фазы I/Q. Топология непосредственно самой зоны обнаружения не менее важна, поскольку как RSSI, так и точность измерения фазы могут ухудшаться из-за наличия тех или иных препятствий. Однако измерения можно значительно улучшить, если для трилатерации использовать несколько локаторов. Трилатерация — один из способов определения координат на местности, метод определения положения геодезических пунктов путем построения на местности системы смежных треугольников, в которых измеряются длины их сторон.
В зависимости от реализации, системы на базе Bluetooth 5.1 должны иметь субметровый уровень точности, буквально до десятков сантиметров. Сегодня поддержка Bluetooth 5.1 уже добавлена всеми основными производителями чипсетов.
Микролокация через UWB
UWB — технология не новая. Как определено в стандарте IEEE 802.15.4, она была впервые развернута в начале 2000-х годов, предполагалось, что она заменит высокоскоростную передачу USB, но так и не получила широкого коммерческого распространения. В последние годы уровни MAC и PHY были улучшены в поправке IEEE 802.15.4z для целей ранжирования.
В отличие от Bluetooth для оценки расстояния UWB использует не уровень сигнала, а время полета — это технология time of flight, или ToF, хорошо известная в лидарах и системах машинного зрения [4, 5]. ToF измеряет время распространения сигнала от передатчика до приемника. Поскольку радиочастотные сигналы распространяются со скоростью света независимо от окружающей среды, оценка расстояния на основе ToF более надежна для окружающей среды, чем метод RSSI, предусмотренный в Bluetooth (рис. 3).

Рис. 3. Принцип определения расстояния в времяпролетной технологии UWB
Технология UWB отличается от Bluetooth и Wi-Fi. Главное отличие в том, что в ней передача информации выполняется не модулированными синусоидальными волнами, а, если говорить точнее и понятнее, модулированными последовательностями импульсов, причем UWB-импульсы имеют очень короткую длительность, порядка наносекунды. В этом ее преимущества для применения в технологии ToF. Кроме того, свойства используемого в UWB сигнала делают эту технологию более устойчивой к многолучевому приему, типичному для внутренних помещений, поскольку короткие импульсы UWB более устойчивы к искажениям от отраженных сигналов, чем сигналы Bluetooth или Wi-Fi.
Измерение расстояния по технологии ToF через UWB может быть дополнено информацией об угле, что обеспечивает еще более точное определение местоположения. Как и в Bluetooth 5.1, для того чтобы вычислить угол прихода радиоволны (AoA), в приемнике отраженной волны базового устройства UWB используется антенная решетка из двух или более антенн. Для определения угла входящего сигнала в расчетах принимается во внимание время прихода отраженной волны (AoD) на каждую антенну и информация о расстоянии между антеннами.
Системы, основанные на технологии UWB, могут в зависимости от окружающей среды достигать точности в диапазоне 10 см. На момент написания статьи несколько крупных производителей чипсетов уже предлагают решения UWB, и принятие этой технологии несколькими производителями смартфонов служит доказательством растущей динамики применения данной технологии.
Микролокация через Wi-Fi 802.11az
Разработка самой новой и наименее известной из обсуждаемых технологий, стандарта Wi-Fi 802.11 az [6] Next Generation Positioning (NGP), близится к завершению. Как и Bluetooth, технология Wi-Fi для определения местоположения некоторое время использовалась с методом на основе RSSI. Но стандарт NGP основан на протоколе точного измерения времени под названием Fine Timing Measurement (FTM),
FTM для оценки расстояния между станциями с поддержкой Wi-Fi и точками доступа использует информацию о времени приема-передачи (RTT). Механизм RTT применяет временные метки времени отправления (time of departure, ToD) и прибытия (time of arrival, ToA). Стандарт 802.11az разработан для улучшения устаревшей FTM за счет новейших функций стандарта 802.11ax (Wi-Fi 6) (рис. 4).

Рис. 4. Принцип определения расстояния в Wi-Fi на основе протокола точного измерения времени
Для усовершенствования 802.11az используются преимущества более широкой полосы пропускания канала, доступной в новых поколениях Wi-Fi. Это стало возможным благодаря тому, что сигналы Wi-Fi 6 поддерживают полосу пропускания канала до 160 МГц, а Wi-Fi 7 — до 320 МГц. Более широкая полоса пропускания обеспечивает более высокое разрешение, а технология MIMO создает лучшую устойчивость к эффектам многолучевого распространения. MIMO (Multiple Input Multiple Output — множественные входы, множественные выходы) — метод пространственного кодирования сигнала, позволяющий увеличить полосу пропускания канала, при котором для передачи данных необходимы две и более антенны и такое же количество антенн для приема.
Для повышения эффективности в протоколе NGP есть кадры нулевого пакета данных (null data packet, NDP), которые уже определены в стандарте 802.11ax для зондирования с формированием диаграммы направленности. Новый стандарт также предусматривает многопользовательские возможности Wi-Fi 6. При использовании ранжирования на основе триггера с OFDMA восходящей и нисходящей линий связи точка доступа за один сеанс передачи может эффективно получать информацию о ранжировании от множества станций. OFDMA (Orthogonal frequency-division multiplexing) — многопользовательская версия цифровой модуляции OFDM, одна из важнейших функций в Wi-Fi 6 для повышения производительности сети. Применение OFDMA значительно сокращает накладные расходы, необходимые для обмена информацией о дальности, и улучшает масштабируемость до большего количества станций.
Пока данные о коммерческих решениях позиционирования с использованием технологии 802.11az NGP довольно ограниченны. Однако информация о тестировании, опубликованная в Wi-Fi Ranging [7], показывает многообещающие характеристики для условий прямой и непрямой видимости, где может быть достигнут уровень точности до дециметра.
Сравнение технологий для микролокации нового поколения
Если сравнивать возможности позиционирования трех технологий, то именно UWB может достичь наивысшего уровня точности на сантиметровом уровне. Системы на основе Bluetooth 5.1, по идее, должны быть способны достигать субметровой точности, в то время как развертывания Wi-Fi на основе 802.11az должны иметь возможность достигать дециметровой точности. Однако при обсуждении точности позиционирования необходимо учитывать множество аспектов. Это и окружающая среда, в том числе и электромагнитная обстановка, конструкция системы, задержка в антенном тракте и еще ряд других параметров, которые могут ухудшить номинальную точность.
Помимо точности позиционирования, на решение об инвестировании в новую технологию влияет множество факторов, и эти критерии зависят от области применения. Например, на принятие решения могут влиять безопасность, энергопотребление, стоимость, существующая инфраструктура, дальность передачи и функциональная совместимость.
В любом варианте, независимо от выбранной технологии, требуется тщательное тестирование проекта, чтобы обеспечить наилучшую производительность и в конечном итоге привести к успешному развертыванию.
Дополнительная информация по данному вопросу доступна по ссылкам [8, 9, 10, 11, 12].
- UWB Use Cases.
- Алексеев В. Новый стандарт IEEE 802.15.4z для сетей сверхширокополосной связи — UWB // Беспроводные технологии. 2019. № 3.
- Bluetooth Core Specification Version 5.1 Feature Overview.
- Рентюк В. Технология распознавания глубины от компании Analog Devices для современных и перспективных приложений // Компоненты и технологии. 2020. № 2, 3.
- Рентюк В. Машинное зрение в 3D: ToF-системы компании SICK // Control Engineering Россия. № 1.
- IEEE P802.11 — Task Group AZ — MEETINGS UPDATE. Status of IEEE 802.11az. Next Generation Positioning (NGP).
- Raissinia C. Z. A., de Vegt R. Qualcomm Wi-Fi Ranging: Delivering ranging and location technologies of tomorrow today. qualcomm.com/media/documents/files/qualcomm-wi-fi-ranging-white-paper.pdf
- Optimizing Healthcare Facilities Using Wireless Technology. https://www.bluetooth.com/
- firaconsortium.org/
- IEEE P802.11az — IEEE Draft Standard for Information technology — Telecommunications and information exchange between systems Local and metropolitan area networks — Specific requirements Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications — Amendment 3: Enhancements for positioning.
- Location, Location, Location! BT 5.1, UWB and 802.11az.
- Qualcomm Wi-Fi Ranging White Paper qualcomm.com/documents/qualcomm-wifi-ranging-white-paper
 15 июня, 2020
15 июня, 2020 28 марта, 2022
28 марта, 2022 11 декабря, 2008
11 декабря, 2008