
Wi-Fi-модуль WizFi210 в системах мониторинга автотранспорта
В настоящее время у многих компаний, располагающих собственным автопарком, возникает необходимость в оперативном слежении за местоположением и состоянием своих транспортных средств, а также передаче на них оперативной информации. Большинство российских компаний, осуществляющих перевозки, рано или поздно сталкивается с проблемой злоупотреблений со стороны работников, непосредственно эксплуатирующих технику. Это и «сливы топлива», и «левые рейсы», и «приписка пробега».
Практически все заинтересованные диспетчерские службы в настоящее время имеют в своем распоряжении те или иные технические средства, позволяющие осуществлять контроль/слежение за передвижением своих объектов. Однако существующие средства не являются совершенными. В последние годы все актуальнее становится задача создания новых технических средств, которые позволили бы решать задачи мониторинга и диспетчеризации подвижных объектов, обладая при этом низкой себестоимостью и низкой стоимостью эксплуатации и обслуживания.
Средства системы мониторинга автотранспорта не только позволяют решать коммерческие цели управления, но и обеспечат повышение безопасности движения объектов и будут способствовать охране человеческой жизни. Данные о дислокации аварийных объектов могут быть переданы в соответствующие поисково-спасательные службы. На этой идее основывается проект всероссийской системы оперативного реагирования и оказания помощи во время дорожно-транспортных происшествий «ЭРА-ГЛОНАСС» (распоряжение Правительства РФ от 14.05.2010 № 731-р), иллюстрация работы которой приведена на рис. 1.
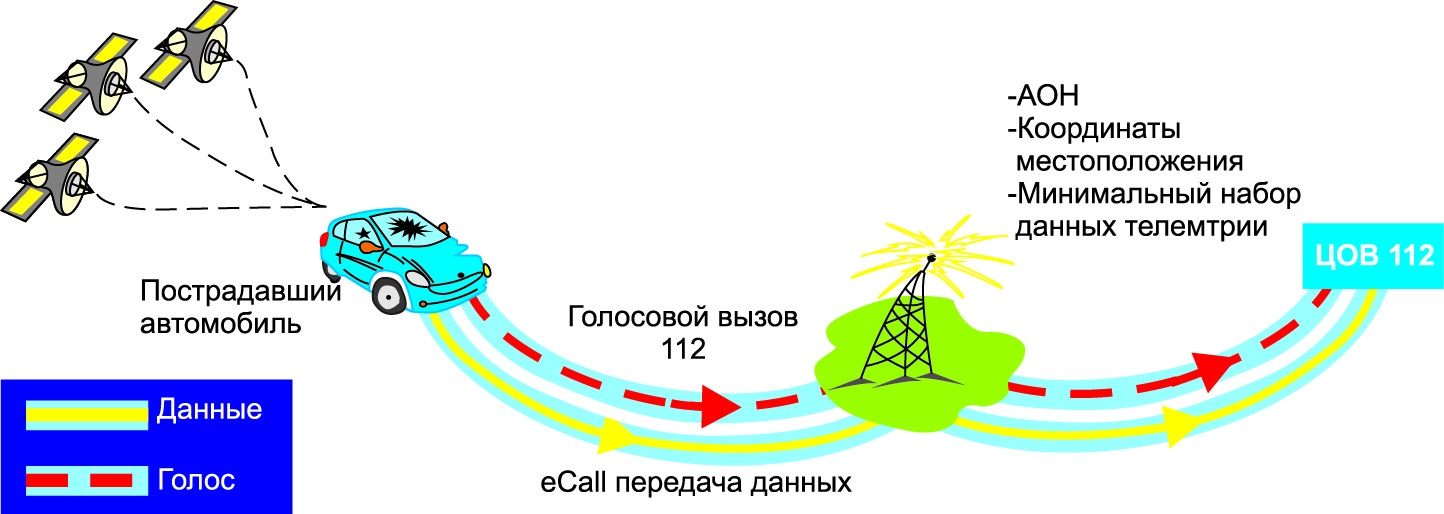
Рис. 1. Система «ЭРА-ГЛОНАСС» в действии
Существуют следующие основные категории потенциальных пользователей, заинтересованных в получении оперативной информации с подвижных и стационарных объектов:
- государственные структуры, эксплуатирующие автомобильный транспорт;
- организации, эксплуатирующие подвижной железнодорожный состав;
- организации, занимающиеся пассажироперевозками;
- организации, занимающиеся грузоперевозками;
- научные организации;
- организации, эксплуатирующие магистральные трубопроводы и иные удаленные объекты;
- предприятия топливно-энергетического комплекса;
- сельскохозяйственные предприятия.
Основные требования, предъявляемые к системам сбора оперативной информации:
- Возможность автоматического определения географического местоположения объекта, не требующего вмешательства в данный процесс оператора. При этом требования к точности определения местоположения составляют обычно несколько десятков метров.
- Возможность оперативной доставки информации от оконечного устройства до пункта сбора данных.
- Частота определений местоположения от нескольких раз в секунду до нескольких раз в час.
- Возможность передачи дополнительной информации с подвижного объекта и обратно.
- Наличие простых и недорогих пользовательских устройств, которые при необходимости могли бы работать от автономных источников питания.
- Низкая себестоимость, а также невысокая стоимость установки, эксплуатации и обслуживания.
В настоящее время самым недорогим, доступным и точным средством определения координат подвижного объекта являются спутниковые навигационные приемники с поддержкой спутниковой системы GPS (например, A2100 и A2200 компании Maestro [1], линейки GPS-приемников компаний Transystem [2] и Telit [3]) и/или ГЛОНАСС (например, широко известные двухсистемные GPS/ГЛОНАСС-приемники «Геос-1М» и «Геос-3» [4] КБ «ГеоСтар навигация» или новый приемник EB-600 [5] от Transystem). Система мониторинга автотранспорта, построенная с использованием спутникового навигационного приемника, способна обеспечивать точность определения местоположения в пределах 50 м в зависимости от условий приема сигналов со спутников.
Требования к терминалам, устанавливаемым на подвижные объекты:
- устойчивость к вибрационным воздействиям;
- малые размеры;
- вес не более 1–1,5 кг;
- низкое энергопотребление;
- электропитание от автономного источника;
- возможность автоматического срабатывания в аварийных ситуациях;
- бесперебойная работа в диапазоне температур –50…+50 °С;
- работа при влажности воздуха 99% (при +30 °С).
Антенны терминалов должны иметь малые габариты и обеспечивать бесперебойную связь при скорости ветра до 30 м/с.
В настоящий момент известно два основных вида систем мониторинга автотранспорта: онлайновые и оффлайновые.
Система on-line
Система типа on-line представляет собой законченное решение со встроенным малогабаритным модулем GSM/GPRS нового поколения. Наиболее широко известными производителями встраиваемых модулей GSM/GPRS являются такие компании, как SimCom и Telit.
Онлайновая система позволяет получать данные об объекте наблюдения в режиме реального времени с заданным интервалом по каналу GPRS. Пакеты данных с установленного на транспортном средстве терминала через Интернет передаются на сервер компании-поставщика или клиента. Модули GSM/GPRS компаний SimCom [6] (например, Sim900) и Telit [7] (линейки модулей GE86x-xxxx, GL86x-xxxx и GC86x-xxxx, где «x» — изменяемый номер версии) имеют встроенный стек протоколов ТСР/IP, позволяющий существенно упростить обмен информацией через Интернет. Эти модули работают в GSM-сетях на частотах 900/1800/1900 МГц и поддерживают передачу данных в трех режимах:
- GSM/GPRS позволяет передавать данные на сервер через Интернет по протоколу ТСР/IP;
- GSM/CSD позволяет передавать данные напрямую на модем диспетчерского пункта со скоростью 9600 бит/с, а также производить настройки оборудования;
- GSM/SMS позволяет дистанционно производить настройку оборудования с мобильного телефона.
На рис. 2 схематически изображен принцип работы системы on-line.Установленная на автомобиле, она записывает данные с датчиков, а также информацию о скорости и местоположении объекта с заданным интервалом времени. Эти сведения по каналу GPRS с помощью модуля GSM/GPRS передаются на сервер (интервал времени получения данных определяется для каждого устройства), затем диспетчер по Интернету при помощи клиентского ПО получает данные (местоположение транспорта в реальном времени) с сервера, после чего они становятся доступными для анализа.

Рис. 2. Принцип работы системы on-line
В некоторых случаях для передачи данных с подвижного объекта на сервер вместо модулей GSM/GPRS могут использоваться Wi-Fi-модули WizFi210 [8] производства известной корейской компании WizNet. Внешний вид модуля WizFi210 показан на рис. 3.

Рис. 3. Внешний вид модуля WizFi210
WizFi210, как и популярные модули сотовой связи GSM/GPRS, содержит встроенный стек сетевых протоколов TCP/IP, обладая при этом значительно более высокой скоростью обмена данными по радиоканалу. Он может заменить модули сотовой связи GSM/GPRS в ряде случаев, когда мониторинг подвижных объектов осуществляется на заведомо ограниченной территории. Одним из основных преимуществ WizFi210 является отсутствие необходимости оплачивать трафик оператора сотовой связи, как в системах, основанных на модулях GSM/GPRS. Принцип работы WizFi210 показан на рис. 4.

Рис. 4. Обмен данными с помощью модуля WizFi210
Для увеличения дальности действия модуля WizFi210 рекомендуется воспользоваться его специальной версией WizFi220 с повышенной мощностью выходного сигнала 100 мВт. Реальная дальность действия модуля WizFi210 или его усиленной версии WizFi220 зависит от приемо-передающей антенны. Производитель выпускает модификацию обоих типов модулей с возможностью подключения внешней антенны [9, 10] (рис. 5).

Рис. 5. Модификация модуля WizFi210 с высокочастотным выводом для подключения внешней антенны
Высокочастотный сигнал подается на вывод для подключения внешней антенны с помощью резистора с нулевым сопротивлением. Подключив к модулю внешнюю антенну с высоким коэффициентом усиления, можно добиться максимальной дальности передачи данных в 300 м в пределах прямой видимости. Для реализации такого подхода на конечной целевой плате разработчика должна присутствовать специальная электрическая цепь согласования волновых сопротивлений высокочастотного вывода модуля и антенны. Обобщенная схема согласующей цепи приведена на рис. 6.

Рис. 6. Обобщенная электрическая схема цепи согласования модуля WizFi210 с внешней антенной
Номинал резисторов R1 и R2 выбирается исходя из параметров микрополосковой линии, соединяющей высокочастотный вывод модуля WizFi210 с антенной на целевой плате [8].
Для упрощения разработки и во избежание необходимости проектирования цепей согласования волновых сопротивлений компания WizNet может поставлять модификацию модулей WizFi210 и WizFi220 со встроенным антенным коннектором U.Fl (рис. 7).

Рис. 7. Модификация модуля WizFi210 с высокочастотным разъемом U.Fl для подключения внешней антенны
В этом случае цепь согласования волновых сопротивлений уже смонтирована на модуле.
Система off-line
В основу этой системы положен принцип «черного ящика», который записывает различную информацию с датчиков транспортного средства, а также сведения о местонахождении объекта, получаемые со спутников с помощью навигационного приемника, установленного на борту транспортного средства.
Терминал, устанавливаемый на транспортном средстве, оснащен специальными интерфейсами для подключения различных датчиков автомобиля, показывающих уровень топлива, давление масла двигателя, температуру охлаждающей жидкости, включение зажигания и т. д., а также установленных дополнительно датчика расхода дизельного топлива и др. Это позволяет реализовать любую задачу, связанную с управлением мобильных объектов — от единичного автомобиля до парка в несколько сотен автомашин.
При формировании пакета данных с интервалом 10 с емкость памяти устройства позволяет записывать данные в течение многих суток. После полного заполнения памяти устройства новые данные записываются «по кругу», стирая наиболее старые. Наличие порта RS-232 в конечном устройстве может существенно расширить его функциональные возможности, а также позволяет производить диагностику и настройку. Перенос информации с объектов наблюдения на компьютер диспетчера осуществляется по прибытии транспортного средства на базу через радиоинтерфейс Wi-Fi с помощью модуля WizFi210 или его усиленной версии WizFi220. На рис. 8 схематически изображен принцип работы оффлайновой системы.
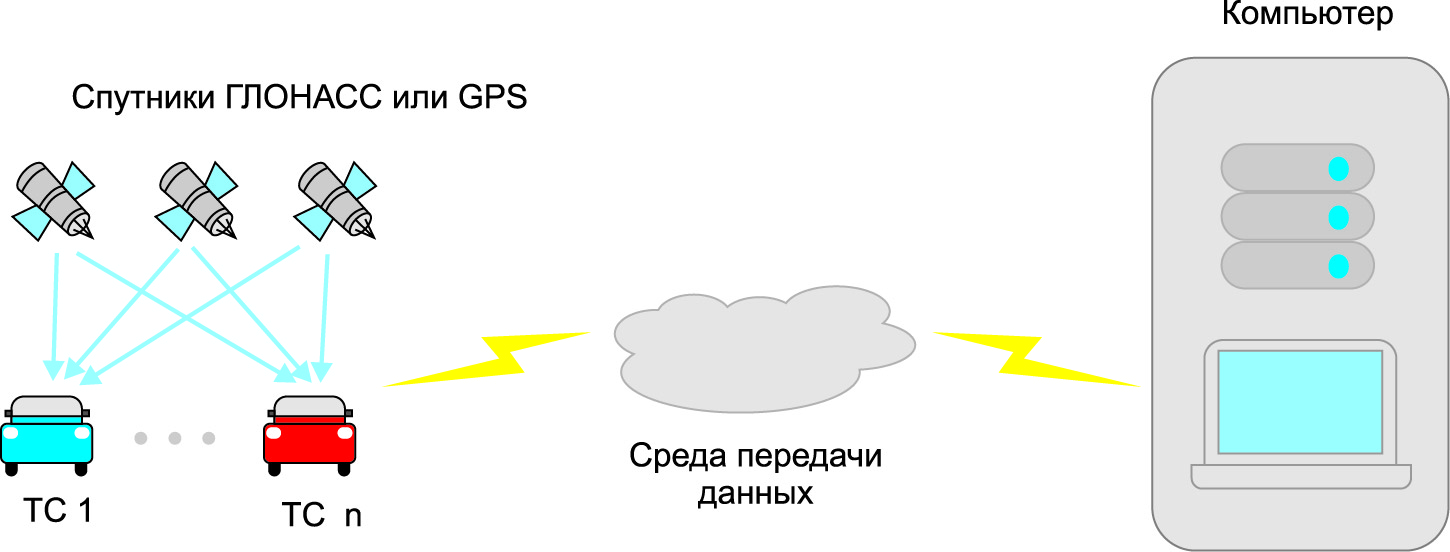
Рис. 8. Принцип работы оффлайновой системы
В случае построения такой системы на основе модуля WizFi210 высокая дальность действия перестает играть решающую роль. Поэтому имеет смысл использовать модификацию модуля со встроенной чип-антенной [9, 10] (рис. 9), что существенным образом ускорит и удешевит разработку.

Рис. 9. Модификация модуля WizFi210 со встроенной чип-антенной, высокочастотный сигнал на которую подается с помощью резистора с нулевым сопротивлением
На эффективность работы системы мониторинга подвижных объектов типа off-line существенное влияние оказывает скорость передачи данных через внешний аппаратный интерфейс модуля WizFi210. Если использовать интерфейс UART, то максимальная скорость составляет 921600 бит/с. Но для передачи больших объемов данных за достаточно короткое время нахождения подвижного объекта в пределах досягаемости сервера этого может оказаться недостаточным. Тогда следует воспользоваться интерфейсом SPI модуля [11] (рис. 10). В этом случае скорость обмена данными может достигать 1,4 Мбит/с.

Рис. 10. Функционирование интерфейса SPI в модуле WizFi210
Для активации интерфейса SPI в модуль WizFi210 с помощью программы WizSmartScript должна быть загружена специальная прошивка. Она полностью сохраняет все AT-команды, которые присутствуют в версии прошивки для обмена данными по UART. Модуль WizFi210 работает как Slave («ведомый»). Соответственно, необходим внешний хост-контроллер, который сможет выполнять статус Master («ведущий»). Соединение модуля WizFi210 с хост-контроллером через интерфейс SPI проиллюстрировано рис. 11.
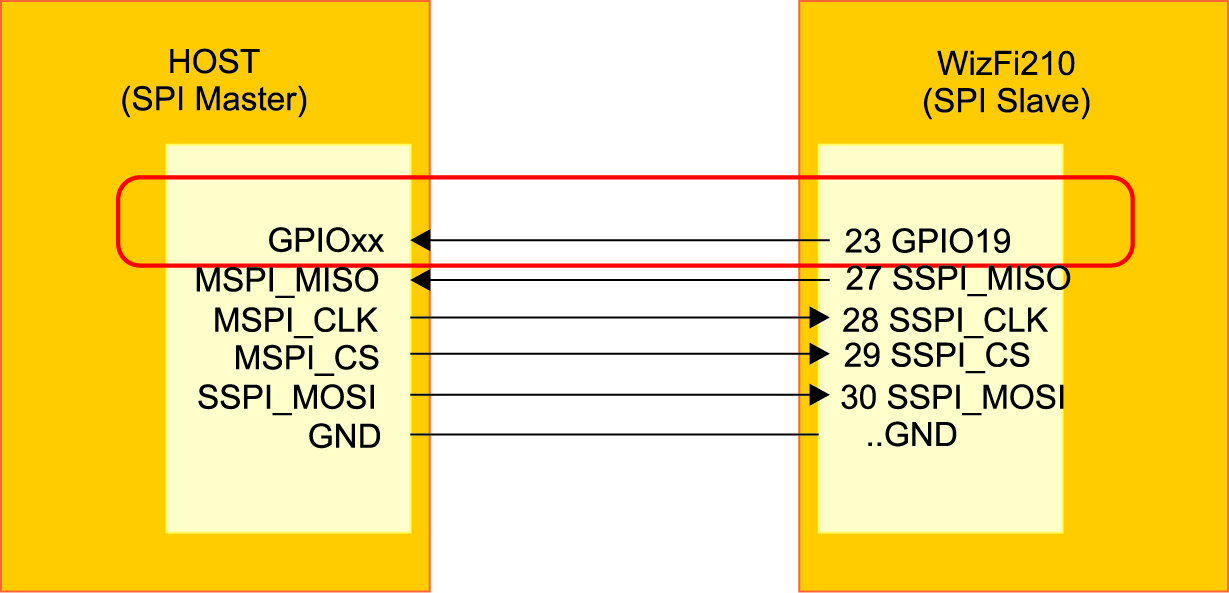
Рис. 11. Подключение модуля WizFi210 к хост-процессору через SPI
Назначение выводов на рис. 11 приведено в таблице.
|
Хост-контроллер (SPI Master) |
WizFi210 (SPI Slave) |
Примечание |
|
MSPI_MOSI |
SSPI_MOSI (30) |
SPI Slave in/Master Out |
|
MSPI_MISO |
SSPI_MISO (27) |
SPI Slave Out/Master in |
|
MSPI_CS |
SSPI_CS (29) |
SPI Chip select |
|
MSPI_CLK |
SSPI_CLK (28) |
SPI Clock |
|
Allocate your GPIO |
GPIO19 (23) |
Host wake-up signal |
|
GND |
GND |
|
Программное обеспечение в системе мониторинга подвижных объектов состоит из двух частей: ПО сервера и клиентского ПО.
Серверное ПО
ПО сервера должно позволять:
- получать и сохранять данные, поступающие с мобильных объектов на выделенные порты сервера по протоколу ТСР/IP (через канал GSM/GPRS или Wi-Fi);
- получать и сохранять данные, поступающие с мобильных объектов в режиме GSM/CSD с использованием GSM-терминала, а также передавать ранее полученные на сервер данные о мобильных объектах на компьютеры диспетчерских центров (по запросу).
Данные, поступающие на сервер, содержат информацию как о маршруте транспортного средства, скорости, данных с датчиков и т. д., так и о местонахождении автомобилей в режиме реального времени и тревожных событиях. При передаче данных необходимо осуществлять их программное сжатие и идентификацию лица, получающего доступ к ним. Серверное ПО должно позволять дистанционно с помощью терминала производить настройку оборудования в ручном режиме, а также полностью производить администрирование базы данных сервера.
Клиентское ПО
ПО клиента должно позволять:
- получать с сервера данные о пройденном транспортным средством маршруте с полной телеметрической информацией (скорость, показания датчиков и т. д.), а также данные о местонахождении мобильных объектов в режиме реального времени;
- сохранять полученные данные на локальном компьютере пользователя;
- передавать на сервер данные, полученные с мобильных объектов, «вручную» с помощью flash-карт;
- организовывать диспетчерские пункты мониторинга и управления мобильными объектами в реальном времени с использованием ГИС;
- просматривать маршруты транспортных средств за выбранный интервал времени;
- получить отчет о маршруте за выбранный интервал времени;
- получать телеметрическую информацию;
- производить администрирование базы данных клиента и настройку ПО под нужды конкретного пользователя.
Система, построенная с использованием описанных принципов, может использоваться на всех видах грузового транспорта, на легковых автомобилях, маломерных судах и других подвижных объектах. В настоящее время она является наиболее надежной и недорогой в эксплуатации системой для мониторинга автотранспорта.
- http://www.mt-system.ru/catalog/linejka-gps-priemnikov-0
- http://www.atoma.spb.ru/catalog/684/gps-moduli-transystem
- http://www.atoma.spb.ru/catalog/683/gps-moduli-telit
- http://www.atoma.spb.ru/catalog/877/gpsglonass-moduli-kompanii-geostar-navigacija
- http://www.atoma.spb.ru/catalog/879/eb-600
- http://www.mt-system.ru/catalog/linejka-modemov-i-terminalov
- http://www.atoma.spb.ru/catalog/58/vstraivaemye-gsmgprs-moduli /ссылка устарела/
- http://www.librostonic.com/pdf/WizFi210/220-User-Manual—%28Version-1.0%29 /ссылка устарела/
- http://www.mt-system.ru/catalog/modul-wizfi210
- http://www.mt-system.ru/catalog/modul-wizfi220
- http://www.wiznet.co.kr/
 22 декабря, 2008
22 декабря, 2008 27 апреля, 2022
27 апреля, 2022 11 июня, 2014
11 июня, 2014